Управляющая система — это… Что такое Управляющая система?
- Управляющая система
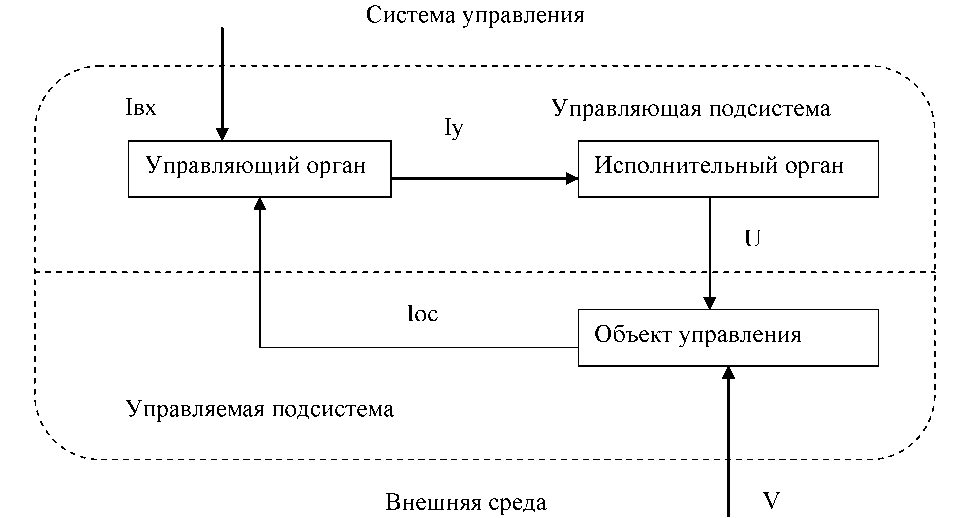
14. Управляющая система — часть системы управления, осуществляющая управление объектом по заданным целям, критериям и ограничениям.
Словарь-справочник терминов нормативно-технической документации. academic.ru. 2015.
- Управляющая роль
- управляющая среда
Смотреть что такое «Управляющая система» в других словарях:
Управляющая система — [control system] (система управления, блок управления, управляющая подсистема) часть кибернетической системы, осуществляющая управление в системе. Она обычно состоит из блока определения целей и блока регулирования (регулятора), поддерживающего… … Экономико-математический словарь
управляющая система — Управляющий объект, представляющий собой систему, подсистемы которой предназначены для выполнения отдельных функций управляющего объекта.
УПРАВЛЯЮЩАЯ СИСТЕМА — одно из центральных понятий кибернетики. Так наз. объекты, к рые имеют определенную структуру и обладают нек рыми функциональными свойствами, отражающими их информационную природу. Понятие У. с. относится к числу понятий, к рые невозможно… … Математическая энциклопедия
управляющая система — Управляющий объект, представляющий собой систему, подсистемы которой предназначены для выполнения отдельных функций управляющего объекта … Политехнический терминологический толковый словарь
управляющая система для среды многоуровневых приложений
— система управления событиями — [Л.Г.Суменко. Англо русский словарь по информационным технологиям. М.: ГП ЦНИИС, 2003.] Тематики информационные технологии в целом Синонимы система управления событиями EN managers of managersМоМ … Справочник технического переводчикауправляющая система безопасности (ядерного реактора) — — [А.
 С.Гольдберг. Англо русский энергетический словарь. 2006 г.] Тематики энергетика в целом EN safety control system … Справочник технического переводчика
С.Гольдберг. Англо русский энергетический словарь. 2006 г.] Тематики энергетика в целом EN safety control system … Справочник технического переводчикадецентрализованная управляющая система — Управляющая система с несколькими независимыми подсистемами, выполняющими функцию принятия решений … Политехнический терминологический толковый словарь
централизованная управляющая система — Управляющая система с одной подсистемой, выполняющей функцию принятия решений … Политехнический терминологический толковый словарь
авиационная управляющая система — управляющая система Управляющая система, преобразующая сигналы вычислительных и (или) измерительных систем в перемещение органов управления самолета, вертолета или их двигателей. [ГОСТ 22837 77] Тематики пилотажно навигационное оборудование… … Справочник технического переводчика
Измерительная управляющая система — измерительная система, предназначенная для целей автоматического управления технологическим процессом, автоматическим производством, движущимся объектом и т.
 д. Для целей управления измерительная управляющая система содержит: элементы… … Финансовый словарь
д. Для целей управления измерительная управляющая система содержит: элементы… … Финансовый словарь
Книги
- Государство и экономика. Основы взаимодействия. Учебник, Шамхалов Феликс Имирасланович. В учебнике рассматриваются место и роль государства в обществе, власть, управляющая система, человеческий фактор в системе управления, экономическая система, различные формы… Подробнее Купить за 484 грн (только Украина)
- Государство и экономика. Основы взаимодействия. Учебник, Шамхалов Феликс Имирасланович. В учебнике рассматриваются место и роль государства в обществе, власть, управляющая система, человеческий фактор в системе управления, экономическая система, различные формы… Подробнее Купить за 378 руб
- Государство и экономика Основы взаимодействия, Шамхалов Ф.. В учебнике рассматриваются место и роль государства в обществе, власть, управляющая система, человеческий фактор в системе управления, экономическая система, различные формы… Подробнее Купить за 266 руб
УПРАВЛЯЮЩАЯ СИСТЕМА — это.
 .. Что такое УПРАВЛЯЮЩАЯ СИСТЕМА?
.. Что такое УПРАВЛЯЮЩАЯ СИСТЕМА?- УПРАВЛЯЮЩАЯ СИСТЕМА
Нервная ткань, представляющая определенную структуру из нейронов и осуществляющая преобразование раздражений, идущих из внешней среды, в определенные воздействия на органы.
ЭВМ, являющаяся нек-рым соединением элементов и способная выполнять данный перечень элементарных актов (команд).
Химич. молекула, характеризуемая определенной конфигурацией атомов и обладающая интересующим нас перечнем свойств (речь идет о свойствах вещества, построенного из данного типа молекул, в частности о цвете в нек-рой дискретной шкале, физич. состоянии при нормальных условиях и т. п.).
состоянии при нормальных условиях и т. п.).
Шахматная позиция, задаваемая расположением фигур на доске и набором допустимых ходов одного из партнеров.
Фраза русского языка, представляющая определенное соединение грамматич. элементов (синтаксис) и обладающая нек-рым смыслом, заложенным автором (семантика).
Каждый из упомянутых объектов выступает как единство нек-рой структуры (или схемы) и определенных свойств, или функции. При рассмотрении объектов как У. с. интересуются, главным образом, их схемно-функциональными характеристиками, не принимая во внимание остальные их качества. Поэтому две У. с., имеющие в нек-ром смысле одинаковые схемы и одинаковое функционирование, не различаются.
Математич. развитие понятия У. с. состоит в уточнении понятия схемы и понятия функции, а также нек-рых других деталей, связанных с учетом информации и расположения частей У. с. Первое построение У. с. относится к 1955 (см. [1]). Позже появились другие, более частные, варианты У. с.- причинные сети Маркова [2], агрегаты Бусленко [3] и др.
Схема У. с. представляет собой нек-рое соединение элементов, каждый из к-рых связан с заданной памятью, образуя в ней т. н. элементарные подсхемы. Состояния памяти, принимаемые из нек-рого конечного (или счетного) множества, задают информацию У. с. Расположение схемы характеризуется набором координат (также из конечного или счетного множества) ее элементов. Наконец, функция У. с. определяет возможные преобразования У. с., происходящие (детерминированно или стохастически) в моменты времени, принадлежащие нек-рой дискретной (не более чем счетной) шкале. Эти преобразования могут изменять информацию (перерабатывая состояния памяти), осуществлять движение У. с. (изменяя координаты элементов), изменять схему (структуру) и функцию (поведение).
Примеры показывают, что схема и функция в У. с. могут иметь разнообразный смысл. Благодаря этому У. с. позволяют описывать физич. У. с. адекватным образом, т. е. с сохранением их функциональных свойств и их структуры (схемы). Поэтому У. с. являются мощным средством для моделирования, при к-ром достаточно точно копируется не только функция объекта, но также и его схема.
Поскольку каждая элементарная подсхема данной У. с. фактически определяет нек-рую элементарную У. с., то исходная У. с. может рассматриваться как некий комплекс, нек-рое соединение элементарных У. с. Вот почему говорят не об определении понятия У. с., а о его уточнении, при к-ром одни У. с. выражаются через другие, взятые в качестве неопределяемых, элементарных. Необходимо также отметить широту понятия У. с., к-рое пригодно для описания не только простейших дискретных преобразователей, но и объектов со сложной функцией и структурой. Напр., для описания ЭВМ, АСУ, роботов, систем с переменной структурой, систем с лобучением
Математическая энциклопедия.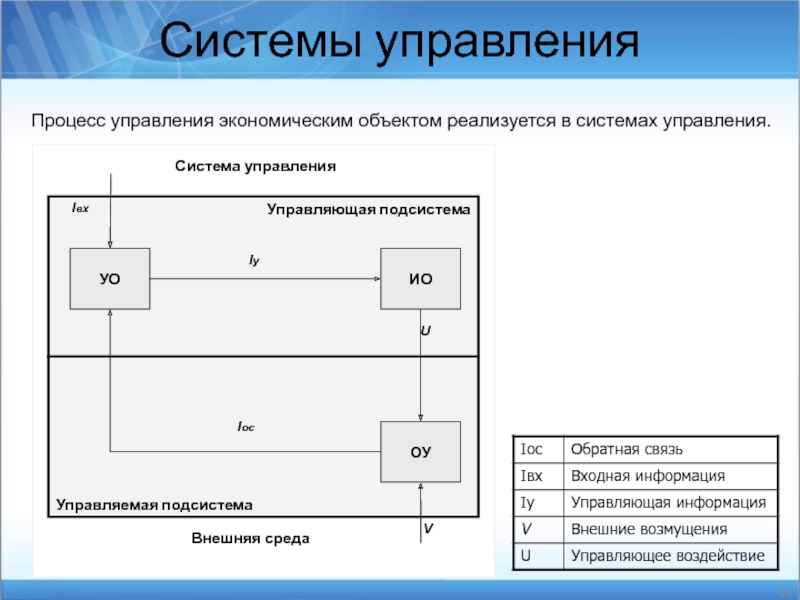 — М.: Советская энциклопедия.
И. М. Виноградов.
1977—1985.
— М.: Советская энциклопедия.
И. М. Виноградов.
1977—1985.
- УПРАВЛЯЕМЫЙ СЛУЧАЙНЫЙ ПРОЦЕСС
- УПРАВЛЯЮЩАЯ ФУНКЦИЯ
Смотреть что такое «УПРАВЛЯЮЩАЯ СИСТЕМА» в других словарях:
Управляющая система — [control system] (система управления, блок управления, управляющая подсистема) часть кибернетической системы, осуществляющая управление в системе. Она обычно состоит из блока определения целей и блока регулирования (регулятора), поддерживающего… … Экономико-математический словарь
управляющая система — Управляющий объект, представляющий собой систему, подсистемы которой предназначены для выполнения отдельных функций управляющего объекта. Примечания 1. К числу типичных подсистем относятся подсистемы: измерения, сбора, обработки, распределения и… … Справочник технического переводчика
Управляющая система — 14.
 Управляющая система часть системы управления, осуществляющая управление объектом по заданным целям, критериям и ограничениям. Источник: НП 026 04: Требования к управляющим системам, важным для безопасности атомных станций … Словарь-справочник терминов нормативно-технической документации
Управляющая система часть системы управления, осуществляющая управление объектом по заданным целям, критериям и ограничениям. Источник: НП 026 04: Требования к управляющим системам, важным для безопасности атомных станций … Словарь-справочник терминов нормативно-технической документацииуправляющая система — Управляющий объект, представляющий собой систему, подсистемы которой предназначены для выполнения отдельных функций управляющего объекта … Политехнический терминологический толковый словарь
управляющая система для среды многоуровневых приложений — система управления событиями — [Л.Г.Суменко. Англо русский словарь по информационным технологиям. М.: ГП ЦНИИС, 2003.] Тематики информационные технологии в целом Синонимы система управления событиями EN managers of managersМоМ … Справочник технического переводчика
управляющая система безопасности (ядерного реактора) — — [А.С.Гольдберг.
 Англо русский энергетический словарь. 2006 г.] Тематики энергетика в целом EN safety control system … Справочник технического переводчика
Англо русский энергетический словарь. 2006 г.] Тематики энергетика в целом EN safety control system … Справочник технического переводчикадецентрализованная управляющая система — Управляющая система с несколькими независимыми подсистемами, выполняющими функцию принятия решений … Политехнический терминологический толковый словарь
централизованная управляющая система — Управляющая система с одной подсистемой, выполняющей функцию принятия решений … Политехнический терминологический толковый словарь
авиационная управляющая система — управляющая система Управляющая система, преобразующая сигналы вычислительных и (или) измерительных систем в перемещение органов управления самолета, вертолета или их двигателей. [ГОСТ 22837 77] Тематики пилотажно навигационное оборудование… … Справочник технического переводчика
Измерительная управляющая система — измерительная система, предназначенная для целей автоматического управления технологическим процессом, автоматическим производством, движущимся объектом и т.
 д. Для целей управления измерительная управляющая система содержит: элементы… … Финансовый словарь
д. Для целей управления измерительная управляющая система содержит: элементы… … Финансовый словарь
Книги
- Государство и экономика. Основы взаимодействия. Учебник, Шамхалов Феликс Имирасланович. В учебнике рассматриваются место и роль государства в обществе, власть, управляющая система, человеческий фактор в системе управления, экономическая система, различные формы… Подробнее Купить за 484 грн (только Украина)
- Государство и экономика. Основы взаимодействия. Учебник, Шамхалов Феликс Имирасланович. В учебнике рассматриваются место и роль государства в обществе, власть, управляющая система, человеческий фактор в системе управления, экономическая система, различные формы… Подробнее Купить за 378 руб
- Государство и экономика Основы взаимодействия, Шамхалов Ф.. В учебнике рассматриваются место и роль государства в обществе, власть, управляющая система, человеческий фактор в системе управления, экономическая система, различные формы… Подробнее Купить за 266 руб
|
№ |
Наименование |
Заказчик |
год |
|
1 |
Информационно-управляющая система Мыльджинского газоконденсатного месторождения АСУТП УКПГ, АСУТП УДСК, АСУ ШФЛУ, АСУ котельной, АСУ водозаборных сооружений, система телемеханики, производственно-диспетчерская служба (I, II, III очереди)
Система управления: Fisher-Rosemount EMERSON RS3, EMERSON DeltaV. |
АО «ГАЗПРОМ» АО «Томскгазпром» |
1999 |
|
2 |
АСУ объектами энергоснабжения пос. Харасавей Система управления: Fisher-Rosemount ROC364, Intellution FIX32. |
АО «ГАЗПРОМ» АО «Надымгазпром» |
1999 |
|
3 |
Информационно-управляющая система Губкинского газового месторождения АСУТП УКПГ, САПКЗ, система телемеханики кустов газовых скважин и газопровода, производственно-диспетчерская служба. Система управления: АСУТП — EMERSON RS3, САПКЗ – Quadlog, СТМ – ROC364, iFIX. |
ЗАО «ПУРГАЗ» |
2000 |
|
4 |
АСУТП Северо-Альметьевской установки комплексной подготовки нефти Система управления: EMERSON RS3. Количество сигналов — 350 |
АО «ТАТНЕФТЬ» |
2000 |
|
5 |
Информационно-управляющая система Восточно-Таркосалинского газоконденсатного месторождения АСУТП и САП УНТС, АСУТП и САП УДК, система телемеханики конденсатопровода, АСУ Э, Вторая очередь АСУТП и САПКЗ УНТС. Система управления: АСУТП — EMERSON DeltaV, САП – ЭМИКОН, iFIX, СТМ – SCADAPack, iFIX. |
ООО «НОВАТЭК-ТАРКОСАЛЕНЕФТЕГАЗ» |
2001 |
|
6 |
Информационно-управляющая система Северо-Уренгойского газоконденсатного месторождения (Западный купол) АСУТП УКПГ, САПКЗ, система телемеханики, производственно-диспетчерская служба. Система управления: АСУТП — EMERSON DeltaV, САП – ЭМИКОН, iFIX, СТМ – ROC364, iFIX. Количество сигналов — 1808 |
АО «НОРТГАЗ» |
2001 |
|
7 |
Информационно-управляющая система Восточно-Таркосалинского газового месторождения АСУТП УКПГ, САПКЗ, система телемеханики кустов газовых скважин, Вторая очередь СТМ, производственно-диспетчерская служба. |
ООО «НОВАТЭК-ТАРКОСАЛЕНЕФТЕГАЗ» |
2001 |
|
8 |
АСУТП УППГ Вьюжного газового месторождения. Система управления: контроллеры Modicon, SCADA — iFIX. Количество сигналов — 300 |
ООО «ЯнгПур» |
2001 |
|
9 |
Система автоматического газового пожаротушения НПС «Невская», «Кириши», «Приморск». Система управления – ЭМИКОН. |
АО «ТРАНСНЕФТЬ» |
2001 |
|
10 |
Система автоматики нефтеперекачивающей станции «Суторминская»
|
АО «ТРАНСНЕФТЬ» АО «Сибнефтепровод» |
2001 |
|
11 |
Информационно-управляющая система Северо-Васюганского газоконденсатного месторождения АСУТП УКПГ, САП, АСУТП котельной
Система управления: EMERSON DeltaV. |
АО «ГАЗПРОМ» АО «Томскгазпром» |
2002 |
|
12 |
АСУТП Ольховской дожимной насосной станции. Система управления: ПЛК SMART PEP Modular Computers, SCADA – InTouch Wonderware. Количество сигналов – 200. |
АО «ТНК» АО «Оренбургнефть» |
2002 |
|
13 |
Информационно-управляющая система Западно-Таркосалинского газоконденсатного месторождения АСУТП УКПГК и САПКЗ (I и II очередь). Система управления: ЭМИКОН ЭК-2000, SCADA-iFIX. Количество сигналов — 842 |
ООО «Энерготехгрупп» |
2003 |
|
14 |
АСУТП и САПКЗ УКПГ Западно-Озерного газового месторождения. |
АО «Сибнефть-Ноябрьскнефтегаз» |
2003 |
|
15 |
АСУТП ЦПС Южно-Мыльджинской группы месторождений. Система управления: ПТК SIMATIC PCS7 Siemens, EMERSON DeltaV. Количество сигналов — 1325 |
АО «Томская нефть» |
2003 |
|
16 |
САПКЗ Западно-Таркосалинского газоконденсатного месторождения Система управления: ЭМИКОН, Intellution iFIX. |
ООО «Энерготехгрупп» |
2003 |
|
17 |
САП резервуарного парка РВС-5000 |
АО «ТАТНЕФТЬ» |
2003 |
|
18 |
Информационно-управляющая система Ханчейского нефтегазоконденсатного месторождения АСУТП УКПГ и САП, АСУТП УНТС, система телемеханики кустов газовых скважин, газопровода, производственно-диспетчерская служба. |
ООО «НОВАТЭК-ТАРКОСАЛЕНЕФТЕГАЗ» |
2004 |
|
19 |
Информационно-управляющая система Юрхаровского газоконденсатного месторождения АСУТП УКПГ, САПКЗ, система телемеханики кустов скважин, газопровода и конденсатопровода, подсистема управления водозаборными сооружениями, АСУ Э, производственно-диспетчерская служба. Система управления: АСУТП, САПКЗ — EMERSON DeltaV, СТМ – ROC364, iFIX. Количество сигналов — 3000 |
ООО «НОВАТЭК-Юрхаровнефтегаз» |
2004 |
|
20 |
САПКЗ УКПГ Вынгаяхинского газового месторождения
Система управления: Siemens QuadLog. |
ОАО «ГАЗПРОМ» ООО «Ноябрьскгаздобыча» |
2004 |
|
21 |
САПКЗ УППГ Еты-Пуровского газового месторождения. Система управления: Siemens QuadLog. Количество сигналов — 250 |
ОАО «ГАЗПРОМ» ООО «Ноябрьскгаздобыча» |
2004 |
|
22 |
АСУТП и САП Восточно-Таркосалинского нефтяного месторождения. Система управления: контроллеры SCADAPack, SCADA — iFIX. Количество сигналов — 450 |
ООО «НОВАТЭК-ТАРКОСАЛЕНЕФТЕГАЗ» |
2004 |
|
23 |
АСУТП ГРС поселка Тарко-Сале. |
2004 |
|
|
24 |
АСУТП ГРС на скважине 71. Система управления: контроллеры SCADAPack, SCADA – Trace Mode. Количество сигналов — 100 |
2004 |
|
|
25 |
АСУТП УКПГ-2 Оренбургского ГПУ |
АО «ГАЗПРОМ» ООО «Оренбурггазпром» |
2004 |
|
26 |
Система телемеханики газосборных сетей |
ООО «НОВАТЭК Юрхаровнефтегаз» |
2004 |
|
27 |
САПКЗ УКПГ Находкинского газового месторождения. |
ООО «Ямалнефтегаз» |
2004 |
|
28 |
Система автоматики резервуарного парка «Западный Сургут» |
АО «ТРАНСНЕФТЬ» АО «Сибнефтепровод» |
2005 |
|
29 |
САППСиКЗ ГТЭС Ватьеганского месторождения. Система управления: Siemens PCS7 (контроллеры SIMATIC серии S7-400). Количество сигналов — 250 |
ООО «ЛУКОЙЛ–Западная Сибирь» |
2006 |
|
30 |
АСУТП пункта сдачи-приёмки нефти «Завьялово». |
ООО «Норд Империал» |
2006 |
|
31 |
АСУТП пункта сдачи-приёмки нефти «Лугинецкое». Система управления: Siemens PCS7 (контроллеры SIMATIC серии S7-400). Количество сигналов — 1000 |
ООО «Норд Империал» |
2006 |
|
32 |
АСУТП НТС-2 Ханчейского газоконденсатного месторождения Система управления: EMERSON DeltaV. Количество сигналов — 500 |
ООО «НОВАТЭК-ТАРКОСАЛЕНЕФТЕГАЗ» |
2007 |
|
33 |
Информационно-управляющая система Уренгойского месторождения, Участок № 1А Ачимовских залежей АСУТП и ПАЗ, САПКЗ, СТМ, АСУ Э. |
ООО «Ачимгаз» |
2008 |
|
34 |
Система телемеханики сбора и транспорта газа Юрхаровского месторождения Система управления: EMERSON DeltaV. Количество сигналов — 200 |
ООО «НОВАТЭК-Юрхаровнефтегаз» |
2008 |
|
35 |
Система телемеханики газосборных сетей Система управления: ROC364, SCADAPack. Количество сигналов — 300 |
2008 |
|
|
38 |
Расширение системы телемеханики кустов газовых скважин газопровода
Система управления: SCADAPack, iFIX. |
ООО «НОВАТЭК-ТАРКОСАЛЕНЕФТЕГАЗ» |
2008 |
|
39 |
АСУТП трубопровода «Верхнечонское газоконденсатное месторождение –«Восточная Сибирь – Тихий океан». Система управления: АСУТП – Yokogawa Centum, ПАЗ, САПКЗ – Yokogawa ProSafe, СТМ – Yokogawa STARDOM. Количество сигналов — 7000 |
ОАО «ТНК-BP» ОАО «Верхнечонскнефтегаз» |
2008 |
|
40 |
Информационно-управляющая система Северного участка сеноманской газовой залежи Губкинского газового месторождения АСУТП, САПКЗ, СТМ. Система управления: АСУТП, ПАЗ — EMERSON DeltaV, САПКЗ – Quadlog. |
ЗАО «ПУРГАЗ» |
2008 |
|
41 |
Расширение Информационно-управляющей системы Ханчейского месторождения. Система управления: АСУТП — EMERSON DeltaV, САП – ЭМИКОН, GE iFIX, СТМ – SCADAPack, iFIX. Количество сигналов – 700 |
ООО «НОВАТЭК-ТАРКОСАЛЕНЕФТЕГАЗ» |
2008 |
|
43 |
САППС и КЗ ГТЭС и ДКС Тевлинско-Русскинского месторождения: ТПП «Когалымнефтегаз». ПТК на базе системы PCS7 Siemens в составе пяти стоек управления, двух автоматизированных рабочих мест оператора. Количество сигналов — 992 |
ООО «ЛУКОЙЛ – Западная Сибирь» |
2009 |
|
44 |
САППС и КЗ КПКУГ Северо-Губкинского месторождения: ТПП «Ямалнефтегаз». |
ООО «ЛУКОЙЛ – Западная Сибирь» |
2009 |
|
45 |
САП ЦППН на Когалымском месторождении Система управления: Siemens PCS7 (контроллеры SIMATIC серии S7-400). Количество сигналов – 1000 |
ЗАО «ЛУКОЙЛ — АИК» |
2009 |
|
46 |
АСУТП по проекту «Реконструкция пристани № 5 Западного района ОАО «Новороссийский морской торговый порт». Система выполнена на базе программно-технического комплекса SIMATIC S7300 Siemens. |
ОАО «Новороссийский морской торговый порт» |
2009 |
|
47 |
АСУ и ПАЗ по проекту «Реконструкция комплекса перевалки нефтепродуктов». Система выполнена на базе PCS7 Siemens. Количество сигналов – 576 |
ОАО «ИПП» |
2009 |
|
48 |
АСУТП и САП УКПГ Стерхового месторождения. ПТК АСУТП на базе EMERSON DeltaV в составе: 4 стойки управления, 3 АРМа — 1800 сигналов с учетом резерва 20%. ПТК САП на базе контроллеров КСАП-01 ЭМИКОН в составе: 4 стойки управления, 1 АРМ — 832 сигнала с учетом резерва 20%. Количество сигналов — 2632 |
ООО «ПурНоваГаз» |
2009 |
|
50 |
АСУТП кустов газовых скважин «Обустройство Восточно-Уренгойского Лицензионного участка». |
ОАО «ТНК-BP» ЗАО «Роспан Интернешнл» |
2009 |
|
51 |
АСУТП кустов газовых скважин «Обустройство Ново-Уренгойского Лицензионного участка». Система управления: Allen-Bradley ControlLogix. Количество сигналов – 1000 |
ОАО «ТНК-BP» ЗАО «Роспан Интернешнл» |
2009 |
|
52 |
АСУТП и САП УКПГ ДКС газоконденсатного промысла Восточно-Таркосалинского месторождения. Система управления: EMERSON DeltaV. Количество сигналов – 900 |
ООО «НОВАТЭК-ТАРКОСАЛЕНЕФТЕГАЗ» |
2010 |
|
53 |
Система телемеханики Стерхового месторождения. |
ООО «НОВАТЭК-ТАРКОСАЛЕНЕФТЕГАЗ» |
2010 |
|
54 |
АСУТП объекта «Обустройство сеноманской газовой залежи. Новогоднее месторождение. Узел подключения газопровода». Система управления: SCADAPack, InTouch. Количество сигналов – 200 |
ОАО «Газпромнефть- Ноябрьскнефтегаз » |
2010 |
|
55 |
САППС и КЗ на КС в районе ГЭТС на Ватьеганском месторождении. Система выполнена на базе PCS7 Siemens, SIMATIC серии S7-400. Количество сигналов – 150 |
ООО «ЛУКОЙЛ-Информ» |
2010 |
|
56 |
АСУ котельной п. Система управления: SCADAPack. Количество сигналов – 150 |
ООО «НОВАТЭК-ТАРКОСАЛЕНЕФТЕГАЗ» |
2010 |
|
57 |
Узел редуцирования топливного газа Южного Узла отбора и учёта газа. Система управления на базе контроллеров STARDOM и ПО верхнего уровня FAST/TOOLS Yokogawa в составе: 1 стойки управления, 1 АРМа. Количество сигналов — 771 |
Sakhalin Energy Ltd |
2011 |
|
58 |
Система контроля и управления электрическими сетями Южного Узла отбора и учёта газа, на базе контроллеров STARDOM и ПО верхнего уровня FAST/TOOLS Yokogawa в составе: 1 стойки управления (3 секции), 1 АРМа. |
Sakhalin Energy Ltd |
2011 |
|
59 |
Система аварийного отключения, обнаружения пожара и загазованности Южного Узла отбора и учёта газа, Сахалин II, на базе контроллеров ProSafe RS и ПО верхнего уровня FAST/TOOLS Yokogawa в составе: 1 стойки управления, 1 АРМа. Количество сигналов — 259 |
Sakhalin Energy Ltd |
2011 |
|
60 |
Система телемеханики кустов скважин Нефтяного промысла Восточно-Таркосалинского месторождения. Система управления: SCADAPack. Количество сигналов – 400 |
ООО «НОВАТЭК-ТАРКОСАЛЕНЕФТЕГАЗ» |
2011 |
|
61 |
Узел редуцирования топливного газа Северного Узла отбора и учёта газа. |
Sakhalin Energy Ltd |
2011 |
|
62 |
Система контроля и управления электрическими сетями Северного Узла отбора и учёта газа. Система управления на базе контроллеров STARDOM Yokogawa. Количество сигналов — 2100 |
Sakhalin Energy Ltd |
2011 |
|
63 |
Система аварийного отключения, обнаружения пожара и загазованности Северного Узла отбора и учёта газа. Система управления на базе контроллеров ProSafe Yokogawa. Количество сигналов — 300 |
Sakhalin Energy Ltd |
2011 |
|
64 |
Модернизация АСУТП УКПГ Южного участка Губкинского ГМ. |
ЗАО «Пургаз» |
2011 |
|
65 |
Реконструкция АСУТП (АСУ «Бункер»). АСУТП отгрузки нефтепродуктов на суда-бункеровщики в г.Новороссийске. Система управления Siemens PCS7. Количество сигналов — 400 |
ОАО «ИПП» |
2011 |
|
66 |
АСУТП централизованного узла учёта нефтепродуктов на ЛДПС «Черкассы». Система управления EMERSON DeltaV. Количество сигналов — 700 |
ОАО «УФАНЕФТЕХИМ» |
2012 |
|
67 |
АСУТП и САП ЦПС и ДКС (верхний уровень) Центрального участка Нефтяного промысла Восточно-Таркосалинского месторождения. |
ООО «НОВАТЭК-ТАРКОСАЛЕНЕФТЕГАЗ» |
2012 |
|
68 |
Система телемеханики второй (резервной) нитки конденсатопровода участка 1А Ачимовских отложений Уренгойского месторождения. Система управления: EMERSON ROC800, DeltaV. Количество сигналов — 1000 |
ЗАО «АЧИМГАЗ» |
2012 |
|
69 |
Система телемеханики и система связи по объекту «Обустройство валанжинских залежей (БТ10, БТ11) Берегового газоконденсатного месторождения». Система управления: Control Microsystems SCADAPack. Количество сигналов — 400 |
ЗАО «Геотрансгаз» |
2012 |
|
70 |
Автоматическая система управления, регулирования и учёта газа. |
ЗАО «Геотрансгаз» |
2012 |
 Количество сигналов — 4350
Количество сигналов — 4350 Количество сигналов — 2670
Количество сигналов — 2670 Количество сигналов — 4450
Количество сигналов — 4450 Система управления: АСУТП — EMERSON DeltaV, САП – ЭМИКОН, iFIX, СТМ – SCADAPack, iFIX. Количество сигналов — 3000
Система управления: АСУТП — EMERSON DeltaV, САП – ЭМИКОН, iFIX, СТМ – SCADAPack, iFIX. Количество сигналов — 3000 Количество сигналов — 2850
Количество сигналов — 2850 Система управления: АСУТП — EMERSON DeltaV, САПКЗ – ЭМИКОН, iFIX. Количество сигналов — 500
Система управления: АСУТП — EMERSON DeltaV, САПКЗ – ЭМИКОН, iFIX. Количество сигналов — 500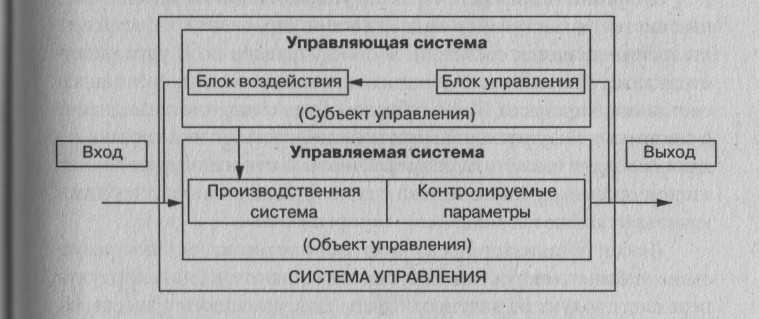 Система управления: АСУТП — EMERSON DeltaV, САП – ЭМИКОН, iFIX, СТМ – SCADAPack, iFIX. Количество сигналов — 1950
Система управления: АСУТП — EMERSON DeltaV, САП – ЭМИКОН, iFIX, СТМ – SCADAPack, iFIX. Количество сигналов — 1950 Количество сигналов — 1100
Количество сигналов — 1100 Система управления: контроллеры SCADAPack, SCADA – Trace Mode. Количество сигналов — 100
Система управления: контроллеры SCADAPack, SCADA – Trace Mode. Количество сигналов — 100 Система управления: Siemens PCS7 (контроллеры SIMATIC серии S7-400). Количество сигналов — 1000
Система управления: Siemens PCS7 (контроллеры SIMATIC серии S7-400). Количество сигналов — 1000 Система управления: Siemens PCS7 (контроллеры SIMATIC серии S7-400). Количество сигналов — 1000
Система управления: Siemens PCS7 (контроллеры SIMATIC серии S7-400). Количество сигналов — 1000 Система управления: АСУТП, ПАЗ — EMERSON DeltaV, САПКЗ – Quadlog. СТМ – ROC800. Количество сигналов — 6000
Система управления: АСУТП, ПАЗ — EMERSON DeltaV, САПКЗ – Quadlog. СТМ – ROC800. Количество сигналов — 6000 Количество сигналов — 500
Количество сигналов — 500 СТМ – ROC364. Количество сигналов — 800
СТМ – ROC364. Количество сигналов — 800 ПТК на базе системы PCS7 Siemens в составе трёх стоек управления и автоматизированного рабочего места оператора. Количество сигналов — 936
ПТК на базе системы PCS7 Siemens в составе трёх стоек управления и автоматизированного рабочего места оператора. Количество сигналов — 936 Количество сигналов – 216
Количество сигналов – 216 Система управления: Allen-Bradley ControlLogix. Количество сигналов – 850
Система управления: Allen-Bradley ControlLogix. Количество сигналов – 850 Система управления: Control Microsystems, контроллеры SCADAPack, Clear SCADA. Количество сигналов – 1200
Система управления: Control Microsystems, контроллеры SCADAPack, Clear SCADA. Количество сигналов – 1200 Пионерный
Пионерный Количество сигналов — 1096
Количество сигналов — 1096 Система управления на базе контроллеров STARDOM Yokogawa. Количество сигналов — 250
Система управления на базе контроллеров STARDOM Yokogawa. Количество сигналов — 250 Система управления EMERSON DeltaV. Количество сигналов — 1700
Система управления EMERSON DeltaV. Количество сигналов — 1700 Система управления: EMERSON DeltaV, ЭМИКОН, GE iFIX. Количество сигналов – АСУТП 2000, САП — 900
Система управления: EMERSON DeltaV, ЭМИКОН, GE iFIX. Количество сигналов – АСУТП 2000, САП — 900 Узел подключения Берегового ГКМ к магистральному газопроводу «Заполярное-Уренгой I, II». Система управления: СТН-3000. Количество сигналов — 200
Узел подключения Берегового ГКМ к магистральному газопроводу «Заполярное-Уренгой I, II». Система управления: СТН-3000. Количество сигналов — 200Управляющая система / Центр управления в кризисных ситуациях
Управляющая система (УС)
Управляющая система (УС) предназначена для планирования и управления учебным процессом, ведения отчетной документации и данных об обучаемых, включает подсистемы авторизации, управления пользователями, управления учебными материалами, ведения базы данных, управления обучением, управления визуализацией, учета результатов обучения, загрузки и запуска 3D моделей, формирования и просмотра учебных материалов, тестирования; учета успеваемости, работы с картографией.
УС позволяет моделировать 3D обстановку по заданным сценариям, обеспечивать 2D и 3D визуализацию виртуального города, позволяя оператору самостоятельно наносить на картографическую основу опасные объекты, обрабатывать картографическую информацию о них, визуализировать результаты расчета интенсивности поражающих факторов и рисков на двумерной цифровой модели местности, обеспечивать визуализацию результатов расчета на трехмерной цифровой модели местности, обеспечивать функционирование графического редактора для планирования действий по организации управления и защиты от различных угроз, отображать генеральные и поэтажные планы зданий/сооружений, информировать обучаемого о его действиях, оценивать их правильность
В состав информационного обеспечения УС включены: Федеральные за-коны и постановления Правительства Российской Федерации, нормативные правовые, методические и руководящие документы в области защиты от ЧС техногенного и природного характера; справочные, экспериментальные и статистические данные по процессам возникновения и развития ЧС природного и техногенного характера, ведения аварийно-спасательных и других неотложных работ; результаты ранее выполненных научно-исследовательских работ, анализа отечественного и зарубежного опыта в области ликвидации последствий ЧС; результаты анализа опыта применения аварийно-спасательных формирований, методики расчета сил и средств для ликвидации различных ЧС.
ЛЕГЧАКОВ К.Е., главный эксперт по внешнеэкономической деятельности в российской государственной компании, аспирант кафедры статистики экономического факультета МГУ имени М.В. Ломоносова, [email protected] Информационно-управляющая система: В статье автор акцентирует внимание читателя на определении и экономической сущности информационно-управляющей системы (ИУС) в XXI веке. Контроль и планирование – наиболее взаимосвязанные функции управления, которые непосредственно влияют на процесс принятия управленческих решений (ППУР) ворганизации. Современный менеджер в малой компании может справиться с потоком информации о бизнес-процессе, происходящем в ней. Однако те функции, которые требуют достаточно специфичных знаний и навыков, одновременно характеризующиеся большим объемом потока данных, требуют автоматизации – будь то малые магазины со своими системами логистики; либо аудиторские фирмы с системами бухгалтерского учета и отчетности; а также крупнейшие вертикально интегрированные холдинговые компании, вкоторых необходимо контролировать и планировать множество бизнес-процессов и выполнять множество управленческих функций своевременно и эффективно. Конечно, огромный пласт информации, используемой в ППУР менеджерами компаний, добывается неформальным путем: общение с сотрудниками и клиентами организации, изСМИ, по личным каналам. Несомненно, информация, полученная из подобных источников, очень полезна, но ее недостаточно. То количество информации, которое выдает сама организация в процессе своей деятельности, а также скорость ее выдачи, обработки и анализа требуют формальных средств работы с ней. Сбор, хранение, обработка, анализ, использование и защита информации – основные функции, которые выполняются информационно-управляющими системами в компаниях разных отраслей экономики. Данные системы призваны во многом упростить труд людей, исключить существенную часть возникающих на производстве ошибок (в том числе подвлиянием человеческого фактора), повысить качество продукции (услуг) и помочь менеджменту компании принимать решения на основании качественной и своевременно предоставленной информации о деятельности всей организации в целом. Информационно-управляющая система «должна выдавать информацию о прошлом, настоящем и предполагаемом будущем. Она должна отслеживать все относящиеся к делу события внутри организации и вне ее. Общей целью ИУС является облегчение эффективного выполнения функций планирования, контроля и производственной деятельности. Самой важной ее задачей является выдача нужной информации нужным людям в нужное время»1. Одним из основных требований, предъявляемых информационно-управляющим системам, является обязательная ориентированность на пользователя системы, причем степень агрегации информации, выдаваемой системой, должна соответствовать уровню ответственности и роли сотрудника в компании, будь то администратор ИТ-службы или генеральный директор. Для того чтобы дать определение информационно-управляющей системе, стоит обратиться к международному стандарту ISA-952 (The International Standard for the Integration of Enterprise and Control Systems3): Информационно-управляющая система (Information Management System, IMS, или MIS – Management Information System, или Enterprise Resource Planning, ERP) – совокупность компонентов, подготавливающих и предоставляющих управленческую, производственную и финансовую информацию для принятия решений. Многие теоретики и практики ИТ-сферы, естественно, дают свои определения, во многом детализируя и расширяя указанное понятие. Так, например, в учебниках по экономической информатике информационная система определяется как «система, предназначенная для сбора, передачи, обработки, хранения и выдачи информации потребителям с помощью вычислительного и коммуникационного оборудования, средств программного обеспечения и обслуживающего персонала»4. В свою очередь, структура современной ИУС выглядит следующим образом (см. рис. 1). Рисунок 1. Сущность (структура) информационно-управляющей системы в ХХI веке Во-первых, это системно-техническая инфраструктура (СТИ), которая с технологической точки зрения включает в себя следующие подклассы оборудования:
Во-вторых, это подсистема обеспечения информационной безопасности (ПОИБ)5. На практике – комплекс средств по защите информации. Третьим из базовых составляющих является программное обеспечение (ПО), которое определяет ИУС в целом. ПО делится на общее (системное), инструментальное и прикладное (специальное). Общее программное обеспечение поддерживает функционирование оборудования (в том числе ПОИБ) и другого ПО. Инструментальное предназначено дляразработки ПО, необходимого для обеспечения функционирования элементов системы. Прикладное, как и общее ПО, поддерживает функционирование оборудования, но на уровне интерфейса конечных пользователей. Естественно, в разных системах названия модулей, как и их функциональность, могут варьироваться. Три вышеперечисленных элемента информационной системы в литературе еще называют аппаратно-программной платформой. И, естественно, основной элемент – множество ключевых и конечных пользователей (сотрудники компании и заинтересованные третьи лица с правом доступа в систему). Часто выделяется еще один дополнительный элемент – ИТ-служба. Данная служба выполняет функции по поддержке работоспособности всей ИУС и сопровождению пользователей системы:
Многие ИУС сегодня являются открытыми системами. При выборе ИУС для предприятия менеджмент должен обращать внимание на ряд критериев. Для ПО – это соответствие бизнес-требованиям организации; доля рынка и успешный опыт внедрения в организациях отрасли, в мире и в России; производительность и масштабируемость; соответствие системно-техническим требованиям; доступность услуг повнедрению и технической поддержке. Для СТИ и ПОИБ – скорость выполнения операций с данными; статистика отказов системы; время отзыва. Наиболее же показательной характеристикой ИУС с экономической точки зрения является совокупная стоимость владения ССВ (Total Cost of Ownership – TCO). В дополнение к рассмотренной технологической классификации информационной системы согласно ISA-95 ИУС можно рассматривать и с точки зрения функциональной классификации. В теории часто говорят об информационной инфраструктуре компании, выделяя стратегический, тактический и операционный уровни управления. Каждому уровню управления соответствует своя степень агрегирования информации. На практике общепринятым является понятие «единое информационное пространство» (ЕИП) организации. В свою очередь, ИУС – лишь часть ЕИП. Поэтому, чтобы сформировать представление о месте ИУС в едином информационном пространстве, необходимо описать общую структуру ЕИП организации (см. рис. 2). Рисунок 2. Компоненты единого информационного пространства в контексте двухзвенной функционально-организационной классификации информационных систем В мире широко применима двухзвенная функционально-организационная классификация информационных систем, которая включает в себя производственные системы и бизнес-системы. Первые отвечают на вопрос «где мои запасы и что с ними происходит?», вторые – «как эффективно используются мои запасы?»6. Чтобы понять различие между этими классами систем, необходимо проанализировать их по ряду критериев. ИУС (информационно-управляющие системы) как класс информационных систем включает:
АСУ ТП (автоматизированные системы управления технологическими процессами – системы, состоящие из персонала и комплекса средств автоматизации его деятельности иоказывающие управляющее воздействие на технологические процессы) как класс информационных систем включает:
Если рассматривать компанию в контексте теории «Организация как организм», то применительно к ЕИП можно сказать, что ИУС своего рода мозг и нервная система организации. Рисунок 3. Перечень типовых функциональных модулей информационно-управляющей системы – на примере SAP R/3 Лицо любой информационной системы – это ее интерфейс.
Естественно, модулей в современных ИУС может быть и больше. Здесь перечислены лишь основные. Так в целом и выглядит информационно-управляющая система в XXI веке. Ее отличие от более старших вариаций заключается в том, что ее функционал более декомпозирован ипозволяет компании поддерживать высокую степень организации данных, характеризующих ее деятельность. С экономической точки зрения, ИУС – это актив компании, который создается строительством и поддерживается в эксплуатации в целях выполнения организацией хозяйственной деятельности. Ключевые слова: информационно-управляющая система, система планирования ресурсов предприятия (ERP). 1 www.bibliotekar.ru. 2 В настоящее время ISA-95 (www.isa-95.com) широко используется большинством компаний – лидеров в области разработки ИУС, их внедрения и использования. Стандарт аналогичен ISO/IEC-62246 и во многом раскрывает понятие ИУС более подробно и структурированно, чем ГОСТ 34.003-90 «Информационная технология. Автоматизированные системы. Термины и определения». 3 International Standardization Association – 95: международный стандарт по интеграции производственных (АСУ ТП) и бизнес-систем (ИУС) на предприятии. 4 Экономическая информатика: Введение в экономический анализ информационных систем: Учебник. – М.: ИНФРА-М, 2005. – 958 с. – (Учебники экономического факультета МГУ им. М.В. Ломоносова). С. 919. 5 Многие стандарты включают ПОИБ в СТИ, что тоже является верным. Однако сложившаяся практика внедрения ИУС на предприятиях показывает, что в современных условиях, когда частыми являются случаи торговли инсайдерской информацией, а также взлома корпоративных и государственных информационных систем хакерами, подсистеме обеспечения информационной безопасности стоит уделять значительное внимание, искусственно выводя ее за рамки совокупности подклассов системно-технической инфраструктуры. 6 Согласно ISA-95. 7 По материалам коллективного блога специалистов SAP «Sap-ConsAlt», www.sap-consalt.ru. Management Information System: Definition and Economic Essence Legchakov K.E., international business chief expert in a russian state-own company, postgraduate on faculty of economics at the Lomonosov Moscow State University, [email protected]. Summary: In this article the author stresses readers’ attention at the definition and the economic essence of a management information system (MIS) in XXI century. The article contains description of MIS structural elements, its position at a company’s integrated information space, and also the most distributed at Russia MIS functional, based on SAP ERP platform. Keywords: management information system, enterprise resource planning (ERP). Мой мир Вконтакте Одноклассники Google+ |
 Статья содержит описание элементов структуры среднестатистической ИУС, ее места в едином информационном пространстве организации, а также наиболее распространенный функционал ИУС крупной российской организации, реализованный на базе платформы SAP ERP
Статья содержит описание элементов структуры среднестатистической ИУС, ее места в едином информационном пространстве организации, а также наиболее распространенный функционал ИУС крупной российской организации, реализованный на базе платформы SAP ERP Что уж говорить отаких компаниях, как Mitsubishi, Siemens и др., своего рода аналогах японских дзайбацу, включающих сотни тысяч сотрудников и ведущих несколько бизнесов в различных отраслях одновременно?
Что уж говорить отаких компаниях, как Mitsubishi, Siemens и др., своего рода аналогах японских дзайбацу, включающих сотни тысяч сотрудников и ведущих несколько бизнесов в различных отраслях одновременно?


 Интеграция со смежными и внешними системами – новый этап развития практики работы с ИУС. Благодаря интеграции ИУС с другими системами информация о деятельности организации стала носить более точный и качественный характер. А управленческие решения, принимаемые менеджментом компаний, приобрели большую обоснованность.
Интеграция со смежными и внешними системами – новый этап развития практики работы с ИУС. Благодаря интеграции ИУС с другими системами информация о деятельности организации стала носить более точный и качественный характер. А управленческие решения, принимаемые менеджментом компаний, приобрели большую обоснованность.
 Так, с точки зрения временного интервала производственные системы (АСУ ТП как класс информационных систем предприятия) работают в режиме реального времени, а бизнес-системы (ИУС как класс) – периодично, имея временные лаги, как вполучении данных, так и в их обработке. По целям управления: производственные системы отвечают за физическое перемещение запасов (продукции, ресурсов) и его отслеживание, бизнес-системы призваны анализировать экономические составляющие производства (например, стоимость, доходность и т.д.). Утрируя, можно говорить, что АСУ ТП – это средство взгляда со стороны станка, ИУС – со стороны менеджмента (совета директоров) компании.
Так, с точки зрения временного интервала производственные системы (АСУ ТП как класс информационных систем предприятия) работают в режиме реального времени, а бизнес-системы (ИУС как класс) – периодично, имея временные лаги, как вполучении данных, так и в их обработке. По целям управления: производственные системы отвечают за физическое перемещение запасов (продукции, ресурсов) и его отслеживание, бизнес-системы призваны анализировать экономические составляющие производства (например, стоимость, доходность и т.д.). Утрируя, можно говорить, что АСУ ТП – это средство взгляда со стороны станка, ИУС – со стороны менеджмента (совета директоров) компании.


 В ИУС это прежде всего функциональные (прикладные) модули, посредством которых пользователь входит ввиртуальный мир своей компании, отражающий ее реальное состояние в определенный момент времени. В современных ИУС, например, в самой популярной на сегодня системе SAP R/3, присутствуют следующие модули7 (см. рис. 3):
В ИУС это прежде всего функциональные (прикладные) модули, посредством которых пользователь входит ввиртуальный мир своей компании, отражающий ее реальное состояние в определенный момент времени. В современных ИУС, например, в самой популярной на сегодня системе SAP R/3, присутствуют следующие модули7 (см. рис. 3): Этот модуль предназначен для поддерживания функции общего объема промышленного производства идругих мероприятий с целью наилучшим образом удовлетворить текущие запланированные уровни продаж (план продаж и прогнозов) на стыке основных целей бизнеса вчасти рентабельности, конкурентоспособности, сроков обслуживания клиентов. Одной из главных целей является создание темпов производства, которые позволят достичь цели руководства по удовлетворению спроса клиентов, сохраняя повышение или снижение запасов, а соответственно и издержек организации.
Этот модуль предназначен для поддерживания функции общего объема промышленного производства идругих мероприятий с целью наилучшим образом удовлетворить текущие запланированные уровни продаж (план продаж и прогнозов) на стыке основных целей бизнеса вчасти рентабельности, конкурентоспособности, сроков обслуживания клиентов. Одной из главных целей является создание темпов производства, которые позволят достичь цели руководства по удовлетворению спроса клиентов, сохраняя повышение или снижение запасов, а соответственно и издержек организации.
 Примеры: Аэрокосмическая сфера и оборона (Aerospace and Defense), Банкинг (Banking), Телекоммуникации (Telecommunication).
Примеры: Аэрокосмическая сфера и оборона (Aerospace and Defense), Банкинг (Banking), Телекоммуникации (Telecommunication). eof
eof Подробнее о ПОИБ – глава 3.
Подробнее о ПОИБ – глава 3.Автоматизированная лабораторная информационно-управляющая система АЛИУС :: kmpsoft
«КМП-Софт» является разработчиком автоматизированной лабораторной информационно-управляющей системы АЛИУС
Деятельность современной химико-аналитической лабораторией немыслима без использования современных информационных систем.
С ростом числа клиентов, регистрируемых образцов, расширения области аккредитации лаборатории растет и количество обрабатываемой информации.
Согласно действующему ГОСТ Р 53798-2010
Лабораторная информационная менеджмент-система (ЛИМС) относится к классу программных продуктов, предназначенных для того, чтобы собирать, анализировать, создавать отчеты, хранить данные, управлять данными и обрабатывать информацию, полученную в лаборатории.
Имея большой опыт в проектировании программного обеспечения в области промышленной экологии и автоматизации аналитических лабораторий, ООО КМП-Софт предлагает Автоматизированную лабораторно-информационную систему АЛИУС.
Основные возможности и преимущества АЛИУС:
Общие
- Многопользовательский доступ на основе web-технологий. Достаточно установки централизованного сервера. Не требуется устанавливать множество копий программного обеспечения, конечные пользователи работают через web-браузер, что в конечном итоге снижает общую стоимость владения;
- Разделение ролей.
 Каждому пользователю сопоставляется определенный набор прав для выполнения различных функций — Администрирования, просмотра данных, регистрации образцов или измерений, контрольные функции, формирование отчетов и т.д. Механизм совмещения ролей может применяться в случае отпусков или болезней сотрудников;
Каждому пользователю сопоставляется определенный набор прав для выполнения различных функций — Администрирования, просмотра данных, регистрации образцов или измерений, контрольные функции, формирование отчетов и т.д. Механизм совмещения ролей может применяться в случае отпусков или болезней сотрудников; - Неограниченное количество контролируемых сред — Питьевая, Сточная, Поверхностная вода, Почвы, Атмосферный воздух и др.
- Широкие возможности администрирования системы, модификация справочников контролируемых элементов, методик выполнения измерений(МВИ), границ предельно допустимых концентраций(ПДК) и многих других;
- Удобный, понятный и современный интерфейс, позволяющий избежать многих ошибок и сократить время обработки заказа;
- Резервное копирование данных;
Для регистрации образцов
- Возможность регистрации как одного, так и нескольких однотипных образцов одновременно;
- Поддержка шаблонов наборов показателей, сокращающих выбор исследуемых элементов в образце;
- Автоматическая или инициативная печать этикеток для образцов на термопринтере;
- Автоматическое уведомление аналитиков и супервайзеров о новых образцах, слежение за статусом и прогрессом проведения исследований.

- Отмена заказов на проведение исследований образцов при необходимости;
Для проведения измерений
- Различные, предусмотренные нормативной документацией, механизмы расчетов результирующих погрешностей измерений на основе относительной, абсолютной или выраженной формулой погрешности для различных диапазонов измерений;
- Возможности учета концентрирования, разбавления, коэффициентов объемов аликвот, холостых проб и др.
- Интерактивное взаимодействие и уведомление пользователей о регистрации новых образцов, проведенных измерениях;
- Поддержка шаблонов наборов показателей, которые позволяют аналитику выбирать те показатели, с которыми он работает наиболее часто;
- Автоматическое уведомление коллег о результатах проведения измерений;
Для контроля за функционированием лаборатории
- Полный доступ к справочникам, электронным журналам регистрации проб и проведения измерений;
- Возможность подтверждения или отклонения результатов измерений с уведомлением аналитика, проводившего анализ;
Для формирования протоколов измерений
- Возможность предварительного просмотра выводимых данных перед формированием окончательного протокола;
- Расчет границ концентраций по различным нормативным документам, в том числе индивидуально для каждого измеренного результата;
- Поддержка нескольких форм протоколов, если заказчику необходим протокол по собственному образцу;
- Выгрузка протоколов в формат MS Office или других;
КМП-Софт готова предложить всестороннюю поддержку в установке и настройке лабораторной информационной системы АЛИУС, консультации и обучение пользователей, доработку и расширение функционала системы с помощью разработки дополнительных модулей, в том числе:
- складских (учет реактивов, планирования расходования и закупок, дат поверки аналитических приборов)
- аналитических (количество регистрируемых образцов, проведенных измерений и т.
 д.)
д.) - интеграции со смежными системами (CRM, бухгалтерские, другие ЛИС)
- размещение программного обеспечение АЛИУС в «облаке» на своих серверах
УПРАВЛЯЮЩАЯ СИСТЕМА • Большая российская энциклопедия
В книжной версии
Том 33. Москва, 2017, стр. 61
Скопировать библиографическую ссылку:
Авторы: С. В. Яблонский
УПРАВЛЯ́ЮЩАЯ СИСТЕ́МА, объект, имеющий определённую структуру и обладающий некоторыми функциональными свойствами, отражающими его информационную природу, одно из центральных понятий кибернетики. Понятие У. с. относится к числу понятий, которые невозможно объяснить, используя только математич. конструкции, поэтому для обсуждения этого понятия необходимо иметь интуитивные представления о них. Примеры физических (неформальных) У. с. – это нервная ткань, представляющая определённую структуру из нейронов и осуществляющая преобразование раздражений, идущих из внешней среды, в определённые воздействия на органы; ЭВМ, являющаяся некоторым соединением элементов и способная выполнять данный перечень элементарных команд; шахматная позиция, задаваемая расположением фигур на доске и набором допустимых ходов одного из партнёров; фраза русского языка, представляющая собой определённое соединение грамматич. элементов (синтаксис) и обладающая некоторым смыслом, заложенным автором (семантика).
Понятие У. с. относится к числу понятий, которые невозможно объяснить, используя только математич. конструкции, поэтому для обсуждения этого понятия необходимо иметь интуитивные представления о них. Примеры физических (неформальных) У. с. – это нервная ткань, представляющая определённую структуру из нейронов и осуществляющая преобразование раздражений, идущих из внешней среды, в определённые воздействия на органы; ЭВМ, являющаяся некоторым соединением элементов и способная выполнять данный перечень элементарных команд; шахматная позиция, задаваемая расположением фигур на доске и набором допустимых ходов одного из партнёров; фраза русского языка, представляющая собой определённое соединение грамматич. элементов (синтаксис) и обладающая некоторым смыслом, заложенным автором (семантика).
Каждый из этих объектов выступает как единство некоторой структуры (или схемы) и определённых свойств или функций. При рассмотрении объектов как У. с. интересуются гл. обр. их схемно-функциональными характеристиками, не принимая во внимание остальные их качества. Поэтому У. с., имеющие в некотором смысле одинаковые схемы и одинаковое функционирование, не различаются.
При рассмотрении объектов как У. с. интересуются гл. обр. их схемно-функциональными характеристиками, не принимая во внимание остальные их качества. Поэтому У. с., имеющие в некотором смысле одинаковые схемы и одинаковое функционирование, не различаются.
Математич. развитие понятия У. с. состоит в уточнении понятия схемы и понятия функционирования, а также некоторых др. деталей, связанных с учётом информации и расположения частей У. с. Схема У. с. представляет собой некоторое соединение элементов, каждый из которых связан с заданной памятью, образуя в ней т. н. элементарные подсхемы. Состояния памяти, принимаемые из некоторого конечного (или счётного) множества, задают информацию У. с. Расположение У. с. характеризуется набором координат (также из конечного или счётного множества) её элементов. Наконец, функционирование У. с. определяет возможные преобразования У. с., происходящие (детерминированно или стохастически) в моменты времени, принадлежащие некоторой дискретной (не более чем счётной) шкале. Эти преобразования могут изменять информацию (перерабатывая состояния памяти), осуществлять движение У. с. (изменяя координаты элементов), изменять схему (структуру) и функционирование (поведение).
с. определяет возможные преобразования У. с., происходящие (детерминированно или стохастически) в моменты времени, принадлежащие некоторой дискретной (не более чем счётной) шкале. Эти преобразования могут изменять информацию (перерабатывая состояния памяти), осуществлять движение У. с. (изменяя координаты элементов), изменять схему (структуру) и функционирование (поведение).
Примеры показывают, что схема и функционирование У. с. могут иметь разнообразный смысл. Благодаря этому У. с. позволяют описывать физич. У. с. адекватным образом, т. е. с сохранением их функциональных свойств и их структуры (схемы). Поэтому У. с. являются мощным средством для моделирования, с помощью которого достаточно точно копируется не только функционирование объекта, но и его схема.
У. с. как математич. модели физич. У. с., изучаемых в кибернетике, обладают рядом характерных черт. Они являются объектами дискретной природы; дискретными являются и схема, и её координаты, и информация, и функционирование, и время. Для У. с. обычно характерна большая сложность, которая проявляется в том, что У. с. может иметь большое количество элементов, сложную структуру их связей, большую и сложно организованную память (и тем самым сложную информацию), сложное функционирование.
Они являются объектами дискретной природы; дискретными являются и схема, и её координаты, и информация, и функционирование, и время. Для У. с. обычно характерна большая сложность, которая проявляется в том, что У. с. может иметь большое количество элементов, сложную структуру их связей, большую и сложно организованную память (и тем самым сложную информацию), сложное функционирование.
Осн. проблематика теории У. с. группируется вокруг трёх проблем – проблемы синтеза, проблемы эквивалентных преобразований У. с., проблемы надёжности и контроля управляющей системы.
Что такое система управления? Определение, необходимость, особенности, типы и блок-схема системы управления
Определение : Комбинация различных элементов, соединенных как единое целое, для управления или регулирования самой себя или любой другой системы с целью обеспечения определенного выхода, известна как Control. система . Мы знаем, что контроль в основном известен как акт регулирования или управления.
система . Мы знаем, что контроль в основном известен как акт регулирования или управления.
Таким образом, система управления используется для управления функционированием физической системы для выполнения желаемой цели .
Например, от телевизионной системы, холодильника, кондиционера до автомобилей и спутников — все требует надлежащего управления, чтобы обеспечить выходной сигнал, для которого он предназначен. Таким образом, все это системы управления.
Потребность в системе управления
Системы управления считаются одним из основных аспектов нашей развивающейся технологии. Каждый сектор отрасли так или иначе связан с системой управления.
Как в космической технике, энергосистеме, транспортной системе, робототехнике, управлении станками и т. Д., все требует контроля. Так что это в основном системы управления.
Они в основном обеспечивают желаемые отклики или приложения, когда им предоставляется надлежащее управление.
Здесь следует отметить, что вход и выход системы управления должны иметь соответствующие математические отношения между собой. Когда существует линейная пропорциональность между входом и выходом системы, она называется линейной системой управления, иначе — нелинейной системой.
Компоненты системы управления
В основном система управления разделена на два основных домена:
- Контролируемый процесс : Часть системы, требующая управления, известна как контролируемый процесс или завод.
- Контроллер : Внутренний или внешний элемент системы, который управляет процессом, известен как контроллер.
Далее, некоторые другие аспекты следующие:
- Вход : Чтобы каждая система обеспечивала определенный результат, должен быть предоставлен некоторый сигнал возбуждения. Этот сигнал обычно подается через внешний источник. Таким образом, поступающий извне сигнал для желаемой операции называется входом.
- Выход : Общий отклик системы, достигаемый после применения входа, известен как выход.
- Неполадки : Иногда даже при предоставлении необходимого ввода система не может сгенерировать желаемый результат. Таким образом, сигнал, вызывающий изменение желаемого выходного сигнала, известен как помехи.
Итак, помехи могут быть двух типов в зависимости от их происхождения. Если возмущение создается самой системой, оно называется внутренним возмущением.
В то время как, если возмущение генерируется откуда-то за пределами системы и по незнанию действует как другой вход в систему, вызывая неблагоприятное воздействие на выход.Тогда это известно как внешние возмущения.
Типы систем управления
Они в основном классифицируются в зависимости от того, участвует ли выход в управляющем действии или нет.
1. Система управления с открытым контуром
В разомкнутой системе применяемый вход или регулирующий коэффициент не зависят от выхода системы.
Система управления без обратной связи иногда называется системой без обратной связи. Это так, потому что не проводится сравнение между вводом и выводом системы для управления действиями.
На рисунке ниже представлена блок-схема разомкнутой системы:
Пример : Погружной стержень
Погружной стержень используется для нагрева воды. Когда подается вход, т.е. подается внешнее питание, стержень начинает нагревать воду. Но не существует способа, с помощью которого стержень мог бы определить требуемый уровень нагрева, т.е. обратной связи нет.
Таким образом, это пример системы управления без обратной связи.
2. Система управления с обратной связью
В замкнутой системе применяемый входной или регулирующий коэффициент зависит от выхода системы. Это также известно как система управления с обратной связью, потому что в таких системах сравнение между входом и достигнутым выходом выполняется для получения желаемого выходного сигнала.
Давайте посмотрим на блок-схему замкнутой системы:
Пример : Кондиционеры
Кондиционеры предназначены для регулирования температуры в помещении.Таким образом, эти системы управления используют термостаты в качестве устройства обратной связи.
Сначала измеряется фактическая температура в помещении, и, соответственно, температура регулируется для получения желаемого значения комнатной температуры.
Характеристики
- Чувствительность : Чувствительность — это способность отображать мгновенное изменение выходного сигнала всякий раз, когда есть какое-либо изменение входного сигнала. Существуют внешние параметры, такие как изменение температуры или другие атмосферные условия, которые мешают реальной работе системы.Таким образом, система управления должна быть чувствительна только к фактически используемому входу, а не к другим внешним параметрам.
- Стабильность : Система должна быть стабильной, обеспечивая выходной сигнал без колебаний во времени.
- Полоса пропускания : Допустимый диапазон частот системы определяет ее полосу пропускания. Таким образом, чтобы иметь хорошую частотную характеристику, система должна иметь широкую полосу пропускания.
- Шум : Нежелательные сигналы, которые отрицательно влияют на работу системы, известны как шум.Хорошая система управления должна проявлять наименьшую восприимчивость к шуму.
- Точность : Система должна выдавать точные выходные данные, чтобы иметь наименьшие шансы на ошибку в достигнутом выходном значении.
- Скорость : Скорость определяет время обработки в системе, в течение которого достигается указанный выход. Таким образом, скорость системы должна быть достаточно высокой для своевременной выдачи результатов.
Это все о базовом внедрении системы управления.
Что такое система управления? — Определение с сайта WhatIs.com
ОтСистема управления — это набор механических или электронных устройств, которые регулируют другие устройства или системы посредством контуров управления. Обычно системы управления компьютеризированы.
Системы управления — центральная часть промышленности и автоматизации. Типы контуров управления, которые регулируют эти процессы, включают системы промышленного управления (ICS), такие как диспетчерский контроль и сбор данных (SCADA), и распределенные системы управления (DCS).
Системы управления используются для повышения производительности, эффективности и безопасности во многих областях, в том числе:
- Сельское хозяйство
- Химические заводы
- Целлюлозно-бумажные комбинаты
- Контроль качества
- Управление котлом и электростанция
- Атомные электростанции
- Экологический контроль
- Водоочистные сооружения
- Очистные сооружения
- Пищевая и пищевая промышленность
- Металлы и рудники
- Фармацевтическое производство
- Сахароперерабатывающие заводы
Существует два основных типа контуров управления: открытые контуры, которые работают с участием человека, и замкнутые контуры, которые полностью автономны.Некоторые петли можно переключать между закрытым и открытым режимами. В открытом состоянии переключаемый контур управляется вручную, а в закрытом — полностью автоматизирован.
Программируемые логические контроллеры (PLC), программируемые контроллеры автоматизации (PAC), удаленные оконечные устройства (RTU), серверы управления, интеллектуальные электронные устройства (IED) и датчики — это некоторые из элементов контуров управления, которые, в свою очередь, являются частью систем управления . Контуры управления, составляющие системы управления, обычно состоят из датчика, контроллера и конечного элемента управления.Датчик считывает переменную процесса или соответствующее измерение. Контроллер получает сигнал от датчика, а затем направляет его в контрольно-измерительные приборы, на удаленные оконечные устройства и на конечные элементы управления, где регулируется параметр процесса, чтобы поддерживать его постоянным на уровне, известном как уставка.
Последнее обновление: декабрь 2017 г.
Продолжить чтение о системе управления Система автоматического управления— обзор
1.3.3.2.2 Алгоритм регулирования температуры
- 1.
Нечеткое управление температурным полем предварительного нагрева
Для достижения контроля температуры предварительного нагрева системы селективного лазерного спекания необходимо найти разумную модель объекта управления, но Температурное поле предварительного нагрева оборудования для селективного лазерного спекания представляет собой сложную нелинейную систему, и трудно найти разумную модель объекта управления для достижения контроля температуры температурного поля предварительного нагрева.Нечеткое управление не требует конкретной модели управления, а регулирование температуры поля температуры предварительного нагрева может быть достигнуто только путем нечеткого вывода.
Технология нечеткого управления — это усовершенствованная стратегия управления и новая технология, основанная на лингвистических правилах и нечетких выводах в современной теории управления, которая является отраслью интеллектуального управления. Теория нечеткого управления была впервые предложена Л.А. Заде, американским ученым и известным профессором Калифорнийского университета в 1965 году, и представляла собой продвинутую стратегию управления, основанную на нечетком выводе в методе представления языковых правил и передовых компьютерных технологиях, основанных на нечетких методах управления. математика.
Самая большая особенность технологии нечеткого управления состоит в том, что она может широко применяться в различных областях. Э. Мамдани, профессор Лондонского университета, получил результат применения не ранее 1974 года. Он впервые применил FC группы нечетких контрольных предложений для управления работой котлов и паровых турбин и добился успеха в экспериментах. С 1985 по 1986 год Япония вступила в период практического использования нечеткого управления.
Нечеткая система управления — это автоматическая система управления.Это замкнутая цифровая система управления с каналом обратной связи, которая реализована в компьютерной технологии управления. В нечеткой системе управления в качестве теоретической основы используются представление знаний в форме нечеткой математики, нечеткий язык и вывод правил нечеткой логики. Ядро его конституции — ФК с интеллектом и самообучением. Основные характеристики нечеткой системы управления следующие:
- 1.
Система нечеткого управления не зависит от точной математической модели системы.Когда точную математическую модель системы сложно получить или ее невозможно найти вообще, доступно нечеткое управление, поэтому оно особенно подходит для сложных систем и нечетких объектов.
- 2.
Обычно нечеткая система управления обладает интеллектом и самообучением. Представление знаний, нечеткое правило и синтетический вывод в нечеткой системе управления в основном основаны на экспертных знаниях или зрелом опыте квалифицированного оператора и могут постоянно обновляться посредством обучения.
- 3.
Ядром нечеткой системы управления является FC. В FC компьютер или однокристальный микрокомпьютер используется в качестве основного корпуса, поэтому он обладает точностью цифровой системы управления и гибкостью программирования.
Основным отличием нечеткой системы управления от обычной компьютерной цифровой системы управления является использование FC. FC — это ядро нечеткой системы управления. Производительность нечеткой системы управления в основном зависит от структуры FC.Нечеткое правило, алгоритм синтетического вывода, нечеткий метод принятия решений и другие факторы, используемые FC, являются ключевыми факторами, определяющими достоинства окончательной нечеткой системы управления. FC также называют контроллером нечеткой логики. Поскольку правило нечеткого управления описывается нечетким условным оператором в нечеткой теории, FC является контроллером языка, который также называется контроллером нечеткого языка.
Как показано на рис. 1.45, FC в основном состоит из пяти частей: нечеткого интерфейса входной величины, базы данных членства, базы правил нечеткого управления, механизма нечеткого вывода и нечеткого интерфейса вывода.Вход FC может быть использован для решения нечеткого управляющего выхода только после нечеткого преобразования в соответствии с фактическими потребностями, что выполняет основную функцию преобразования входа измеренного значения в нечеткий вектор, и нечеткий вектор может быть либо одиночным. вход или несколько входов. База данных членства хранит значения векторов принадлежности всех нечетких подмножеств всех входных и выходных переменных. Если нечеткая область дискурса является непрерывной областью, это функция принадлежности. Правило FC в основном основано на экспертных знаниях или многолетнем опыте, накопленном квалифицированными операторами.База нечетких правил и база данных составляют базу знаний всей FC. Механизм нечеткого вывода является функциональной частью FC, который решает нечеткое уравнение отношений с помощью нечеткого вывода и получает нечеткую управляющую величину на основе правила нечеткого управления в соответствии с входной нечеткой величиной. Нечеткий вывод — самая фундаментальная проблема в теории нечеткой логики.
Рисунок 1.45. Нечеткий контроллер.
Обычно система контроля температуры представляет собой систему с большой инерцией, а регулирование температуры реализуется с помощью алгоритма ПИД, нечеткого алгоритма и алгоритма нейронной сети.На практике в области техники управления эксплуатационные характеристики или характеристики входов и выходов многих сложных объектов или процессов управления трудно дать с помощью простых и практичных физических законов или математических соотношений. В некоторых процессах изменение состояния процесса не может быть точно обнаружено надежными средствами обнаружения, что приводит к трудностям в получении модели объекта, применимой к текущей теории проектирования систем управления, в классическом методе математического моделирования, и, как правило, обнаружение завершается нечеткий метод управления.Учитывая реальное состояние системы и сложную программу алгоритма, для контроля температуры используется нечеткий алгоритм.
Базовая структура нечеткой системы управления температурой предварительного нагрева показана на рис. 1.46. Входом нечеткой системы управления является температура поля температуры предварительного нагрева, измеренная инфракрасным термометром, а выходом — интенсивность нагрева нагревательного устройства поля температуры предварительного нагрева. При реализации контрольных мероприятий необходимо не только определить отклонение температуры предварительного нагрева между входной и заданной температурой, чтобы решить, какие меры будут приняты, но также определить скорость изменения отклонения температуры предварительного нагрева.То есть взвешивание и оценка выполняются всесторонне на основе отклонения и скорости изменения отклонения, тем самым обеспечивая стабильность управления системой и уменьшая перерегулирование и колебания. Следовательно, когда осуществляется контроль температуры, в нечеткой концепции задействованы три лингвистических вариабельных домена дискурса: отклонение температуры Δ T , скорость изменения отклонения Δ Te и выход контрольной величины U .
Рисунок 1.46. Принципиальная структурная схема системы нечеткого управления температурой предварительного нагрева.
Нечеткое подмножество лингвистической переменной области дискурса описывается функцией принадлежности μ ( x ). Функция принадлежности μ ( x ) может быть определена на основании опыта эксплуатации оператора или статистических методов. В обычно используемой области дискурса (−6, −5, −4, −3, −2, −1, −0, +0, 1, 2, 3, 4, 5 и 6) восемь переменных нечеткого языка определены значения: отрицательный большой (NB), отрицательный средний (NM), отрицательный маленький (NS), отрицательный ноль (NO), положительный ноль (PO), положительный маленький (PS), положительный средний (PM) и положительный большой ( ПБ).В соответствии с характеристикой мышления, при которой люди склонны следовать нормальному распределению в своих суждениях о вещах, обычно используется нормальная функция:
(1,46) μ (x) = e — ((x − a) / b) 2
Для функции принадлежности μ ( x ) нечеткого набора параметр a для нечетких наборов NL, NM, NS, NO, PO, PS, PM и PL может быть установлен как +6, + 4, +2, +0, −0, −2, −4 и −6 соответственно; когда параметр b больше нуля, чем больше значение b , тем ниже будет чувствительность управления, тем более плавными будут характеристики управления и тем выше будет температура; чем меньше значение b , тем выше будет чувствительность управления, но в процессе управления может возникнуть перерегулирование.
Отклонение температуры Δ T , скорость изменения отклонения Δ T e и нечеткая таблица принадлежности выхода контрольной величины U могут быть получены путем расчета на основе установленного значения и измеренного значения температуры предварительного нагрева, тем самым получение нечеткой контрольной таблицы. При управлении в реальном времени контрольное количество в реальном времени может быть получено только в форме просмотра таблицы. В процессе изготовления деталей регулирующая переменная Δ и нечеткого управления получается путем принятия временного цикла T в качестве единицы времени управления в соответствии с изменением информации секции с Δ на текущем с o слой и предыдущий слой с p , текущее значение отклонения температуры t c и текущая скорость изменения отклонения температуры t Δ .При практическом управлении температурой предварительного нагрева интенсивность регулирования температуры получается в соответствии с информацией об изменении раздела в форме просмотра таблицы. В процессе графического сканирования системы селективного лазерного спекания изменение информации о сечении включает в себя как изменение площади сечения, так и изменение контурного кольца. Вновь добавленное контурное кольцо необходимо подвергнуть специальному предварительному нагреву, а модель регулирования температуры предварительного нагрева показана в формуле (1.47).
(1.47) Δu = f (sc, sp, tc) = {K1, Area (sc, sp)> S1orGirth (sc, sp)> D1K2, S1≥Area (sc, sp) ≥S2orD1≥Girth (sc, sp) ≥D2K3, Outring (sc, sp) = true0, по умолчанию
, где K 1 , K 2 и K 3 — это величина контроля температуры предварительного нагрева при различных изменениях информации раздела и K 1 > K 2 > K 3 ; Площадь (sc, sp) — это разница площадей между sc и sp среза; S 1 и S 2 — оценочная стоимость изменения площади, а S 1 > S 2 ; Обхват (sc, sp) — это разница в периметрах между срезом sc и sp. D 1 и D 2 — оценочная стоимость изменений периметра, а D 1 > D 2 ; и Outring (sc, sp) — разница в количестве внешних колец между срезами sc и sp. Хотя такая информация, точная величина контроля температуры может быть предоставлена на протяжении всего производственного процесса.
- 2.
Стабильное и равномерное управление температурой предварительного нагрева
Регулирование температуры поля температуры предварительного нагрева системы селективного лазерного спекания может быть достигнуто с помощью метода нечеткого управления.Однако в процессе изготовления деталей в системе селективного лазерного спекания необходимо обеспечить стабильное, равномерное управление всей температурой предварительного нагрева и отклонение температуры во всем рабочем поле в пределах ± 3 ° C. Температура поля температуры предварительного нагрева должна поддерживаться как можно ближе к заданному значению температуры в процессе контроля температуры предварительного нагрева. В процессе фактического контроля температуры предварительного нагрева входом для контроля температуры является температура порошкового слоя, измеренная инфракрасным термометром, и весь слой порошка нагревается тепловым излучением ламповых трубок.Поскольку температура обнаружения может быть нестабильной из-за внешних помех, могут возникать отклонения температуры, обнаруживаемые системой, и даже скачки, приводящие к нестабильному управлению. Среда предварительного нагрева и условия нагрева в каждой точке всего рабочего поля различны, что создает большие трудности для единообразного управления температурным полем предварительного нагрева.
Система контроля температуры предварительного нагрева системы селективного лазерного спекания представляет собой систему с большой инерцией, поэтому не будет резких изменений температуры предварительного нагрева.В случае возникновения скачков температуры в системе, подверженной помехам, необходимо исключить такие скачки температуры или минимизировать влияние таких скачков температуры. Учитывая, что изменение температуры в поле температуры предварительного нагрева является относительно медленным процессом, значение измерения температуры также относительно мягкое. Поэтому сглаживающий фильтр предназначен для реализации сглаживающей фильтрации на обнаруженном температурном сигнале, и влияние каждого значения определения температуры на обнаружение температуры уменьшается за счет принятия значения обнаружения температуры в течение определенного промежутка времени в качестве обнаруженного образца, тем самым уменьшая влияние интерференционного сигнала.Пространство выборки представляет собой очередь T [ n ] длиной n , и температура поля температуры предварительного нагрева определяется в соответствии с определенным временным циклом, а значение обнаружения вводится в очередь. Значение измерения температуры проходит через очередь в соответствии с правилом «первым пришел — первым вышел», и когда значение измерения температуры находится в определенной позиции очереди T [ i ] (0 < i < n ), соответствующий вес — P [ i ].Температура обнаружения может быть получена путем взвешенного усреднения, и метод расчета показан в формуле (1.48):
(1.48) T = ∑i = 1nT [i] P [i] / ∑i = 1nP [i]
текущему значению обнаружения температуры T [1] должен быть назначен максимальный вес, и чем дальше значение обнаружения будет от текущего состояния обнаружения, тем меньший вес будет назначен. После сглаживания обнаруженного значения температуры влияние слабых помех на систему может быть в основном устранено, но сильные колебания температуры обнаружения системы, вызванные сильными помехами, не могут быть устранены эффективно.Следовательно, необходимо определить рациональность текущей температуры обнаружения с определенным пороговым значением при реализации сглаживающей фильтрации по значению обнаружения температуры, тем самым устраняя сильные помехи.
Как показано на рис. 1.47, каждое измеренное значение температуры представляет собой средневзвешенное значение последовательных значений n измерений. Чем больше получается значение n , тем мягче будет изменяться значение определения температуры, на которое рассчитано средневзвешенное значение.Влияние любого одного значения измерения температуры на общее измерение температуры будет уменьшено, но в то же время увеличится задержка управления системой контроля температуры. Сглаживая фильтрацию по измеренным значениям, можно в принципе исключить влияние небольших колебаний температуры на систему температуры предварительного нагрева. На практике значение n не может быть слишком большим. Если значение n слишком велико, задержка регулирования всей системы регулирования температуры будет слишком большой для достижения хорошего эффекта регулирования.
Рисунок 1.47. Блок-схема определения температуры.
Для сильных помех не только сглаживающая фильтрация значения обнаружения не устраняется эффективно, но также увеличивается время действия сильных помех, что требует дополнительных мер при реализации сглаживания значения обнаружения, тем самым устраняя сильные помехи. Поскольку температура предварительного нагрева не изменяется внезапно за короткое время, значение области M может быть установлено заранее.Когда разница между значением Tm обнаружения и текущей средневзвешенной температурой T c больше, чем M , считается, что текущее значение обнаружения подвергается помехам, которые классифицируются как недопустимые. Если разница находится в пределах порогового диапазона, очередь значений определения температуры обновляется, и средневзвешенное значение получается как текущее значение измерения температуры. В то же время во время работы системы селективного лазерного спекания существует разумный диапазон температуры предварительного нагрева.Когда температура выходит за пределы допустимого диапазона, можно считать, что сигнал помехи отфильтрован.
При определенной стратегии контроля температуры плавное регулирование системы температуры предварительного нагрева может быть в основном обеспечено с помощью метода нечеткого контроля и ряда мер по предотвращению помех; в то же время вся система контроля температуры предварительного нагрева может работать безопасно и стабильно в течение длительного времени, обладая при этом определенной отказоустойчивой способностью с необходимыми мерами контроля.
Температурное поле предварительного нагрева системы селективного лазерного спекания представляет собой квадратное рабочее поле, а температурная среда вокруг рабочего поля отличается. Чтобы добиться равномерного регулирования температуры предварительного нагрева, интенсивность регулирования должна быть различной, когда осуществляется контроль температуры предварительного нагрева. На практике слой порошка предварительно нагревается в методе лучистого нагрева ламп, и трубки лампы распределяются выше температурного поля предварительного нагрева. Основываясь на различных условиях предварительного нагрева, он разделен на три группы для управления, тем самым достигая единообразного управления температурным полем предварительного нагрева.
Учебное пособие по системам управления — javatpoint
Control Systems Tutorial предоставляет базовые и расширенные концепции библиотеки систем управления. Наше руководство по системе управления предназначено как для новичков, так и для профессионалов.
Наше учебное пособие по системе управления включает в себя все темы учебного пособия по системе управления, такие как введение в систему управления, классификация, передаточная функция, графы потоков сигналов, формула усиления Мейсона, блок-схема, модель пространства состояний и т. Д.
Введение в системы управления
Система управления — это система, в которой выход регулируется путем изменения входа.Первым устройством системы управления был регулятор Flyball Джеймса Ватта, который был изобретен в 1767 году. Цель изобретения регулятора Flyball состояла в том, чтобы поддерживать постоянную скорость двигателя, регулируя подачу пара в двигатель.
В системе управления поведение системы описывается дифференциальными уравнениями. Дифференциальные уравнения могут быть как обыкновенными дифференциальными уравнениями, так и разностными уравнениями.
Есть два типа системы управления:
- Система управления без обратной связи.
- Система управления с обратной связью.
Система управления без обратной связи
Система управления без обратной связи — это система, в которой управляющее воздействие не зависит от желаемого выходного сигнала. В этой системе выходной сигнал не сравнивается с входным, что означает, что в этой системе нет сигнала обратной связи. Система управления без обратной связи также известна как система управления без обратной связи или система управления без обратной связи.
Примеры
- Стиральная машина автомат — В этой системе время работы устанавливается вручную.По истечении установленного времени машина останавливается независимо от того, достигнута ли желаемая чистота, потому что нет сигнала обратной связи, который машина может определить.
- Погружной стержень — в этой системе стержень нагревает воду, но сколько горячей воды требуется, стержень не может определить его количество.
Преимущества разомкнутой системы управления
- Разомкнутые системы просты.
- Это экономичные.
- Требуется меньше обслуживания и это несложно.
Недостатки разомкнутой системы управления
- Разомкнутые системы неточны.
- Эти системы ненадежны.
- Это медленно.
- Оптимизация невозможна.
Система управления с обратной связью
Система управления с обратной связью — это система, в которой управляющее действие зависит от желаемого выхода. В этой системе выходной сигнал сравнивается с опорным входным сигналом и вырабатывается сигнал ошибки, затем этот сигнал ошибки подается в контроллер, чтобы уменьшить ошибку и получить желаемый выходной сигнал.
Примеры
- Утюг электрический.
- Серво стабилизатор напряжения.
- Кондиционер.
Преимущества замкнутых систем
- Эти системы более надежны.
- Системы с обратной связью быстрее.
- Многие переменные могут обрабатываться одновременно.
- Возможна оптимизация.
Недостатки замкнутых систем
- Замкнутые системы дороги.
- Техническое обслуживание затруднено.
- Для этих систем установка затруднительна.
Разница между системой без обратной связи и системой с обратной связью
| S. No. | Система с открытым контуром | Система с замкнутым контуром |
|---|---|---|
| 1 | Их проще построить. | Их сложно построить. |
| 2 | Эти системы ненадежны. | Эти системы надежны. |
| 3 | Эти системы медленные. | Эти системы быстрее. |
| 4 | Эти системы в целом более стабильны. | Эти системы менее стабильны. |
| 5 | Оптимизация невозможна. | Возможна оптимизация. |
| 6 | Примеры — Сушилка для рук, стиральная машина. | Серво стабилизатор напряжения, кондиционер. |
Индекс систем управления
Необходимое условие
Перед изучением Руководства по системе управления вы должны иметь базовые знания языка JAVA.
Аудитория
Наше руководство по системе управления предназначено для начинающих и профессионалов.
Проблемы
Мы заверяем, что вы не найдете никаких проблем в этом Руководстве по системе управления. Но если есть какая-то ошибка, опубликуйте проблему в контактной форме.
Дом | Общество систем управления IEEE
Биография
Мария Прандини родилась в Брешии, Италия, 8 сентября 1969 года. Она получила степень Лауреа с отличием в области электротехники Миланского политехнического университета (1994) и докторскую степень. степень в области информационных технологий Университета дельи Студи в Брешии (1998 г.). После ее доктора философии исследований, она была приглашенным докторантом в Лаборатории исследований электроники Калифорнийского университета в Беркли с 1998 по 2000 год.Она также занимала приглашенные должности в Делфтском технологическом университете (1998 г.), Кембриджском университете (2000 г.), Калифорнийском университете в Беркли (2005 г.) и Швейцарском федеральном технологическом институте в Цюрихе (2006 г.).
С декабря 2002 г. по январь 2011 г. она была доцентом в Dipartimento di Elettronica e Informazione Миланского политехнического университета. С февраля 2011 года по февраль 2018 года она была доцентом той же кафедры, которая теперь называется Dipartimento di Elettronica, Informazione e Bioingegneria, где она в настоящее время является профессором.
Ее исследовательские интересы включают рандомизированные методы системного анализа и проектирования; моделирование, верификация и управление стохастическими и гибридными системами; и многоагентные системы, включающие распределенную оптимизацию и теоретико-игровые решения для совместного и некооперативного принятия решений. Ее исследования были мотивированы в основном приложениями в области транспорта и энергетики.
С 1999 года она ведет курсы по контролю на уровне бакалавриата и магистратуры в Италии, а также в международных учреждениях за рубежом.В частности, она была лектором доктора философии. курс по стохастическим системам: оценка и управление в Калифорнийском университете в Беркли (весна 1999 г.), магистерский курс по гибридным системам в Штутгартском университете (первый семестр 2014-2015 гг.) и докторский курс по гибридным системам в Лунде. Университет (октябрь 2015 г.). Она преподает магистерский курс по нелинейному управлению в своем учреждении, где она также преподает курсы повышения квалификации для докторов наук. студенты по гибридным системам и совместной и некооперативной оптимизации и управлению.
В настоящее время она возглавляет программу автоматизации и управления в Миланском политехническом университете.
Она была главным исследователем в финансируемом ЕС проекте h3020 UnCoVerCPS \ Unifying Control and Verification of Cyber-Physical Systems (2015 {2018), отвечая за научную деятельность команды PoliMi, которая включает разработку методов распределенной оптимизации. для сетевых систем.Ранее она участвовала в финансируемых ЕС проектах по моделированию, проверке и контролю стохастических и гибридных систем с применением в области энергетики и транспорта.В частности, она была руководителем рабочего пакета в проекте FP5 HYBRIDGE \ Распределенное управление и стохастический анализ гибридных систем, поддерживая проектирование критически важных для безопасности систем в реальном времени »(2002 {2005), и главным исследователем в проекте FP6 iFly \ Safety, Complexity и «Ответственное проектирование и проверка высокоавтоматизированного управления воздушным транспортом» (2007 {2011) и в проекте FP7 MoVeS «Моделирование, проверка и управление сложными системами: от основ до приложений для электросетей» (2010-2013).
Она была членом редакционных советов ведущих контролируемых журналов в качестве младшего редактора (IEEE Transactions on Automatic Control, 2009-2013, IEEE Transactions on Control Systems Technology, 2009-2015, и Nonlinear Analysis: Hybrid Systems, 2011- 2015) и в качестве редактора дискуссий (European Journal of Control, 2007-2013). Она является членом редакционного совета конференции IEEE Control Systems Society (CSS) (с 2007 г.) и редакционного совета конференции Европейской ассоциации управления (EUCA) (с 2013 г.) в качестве младшего редактора.В настоящее время она является младшим редактором журнала IEEE Transactions по управлению сетевыми системами. Она активно работала в IEEE CSS и Международной федерации автоматического управления (IFAC). Она является членом Технического комитета МФБ по дискретным и гибридным системам (с 2008 г.). Она была назначена членом политического комитета МФБ на 2017-2020 годы. Она вносила свой вклад в деятельность и управление IEEE CSS в различных ролях. С 2013 по 2015 год она была редактором электронных публикаций CSS.Она была избрана членом Совета управляющих IEEE CSS сроком на три года (2015-2017). Она была вице-президентом IEEE CSS по конференционной деятельности в 2016 и 2017 годах. Она была избранным членом комитета по назначениям CSS на 2018 год.
В настоящее время является членом Совета директоров SIGBED.
Она была членом программных комитетов нескольких международных конференций, а также занималась организацией или участием в приглашенных сессиях, семинарах и учебных курсах.Она была сопредседателем 21-й Международной конференции ACM по гибридным системам: вычисления и управление (HSCC 2018).
В настоящее время она является со-председателем программы IEEE Conference on Decisione and Control 2020 и программным председателем IEEE Conference on Decisione and Control 2021.
В 2018 году она получила награду IEEE CSS Distinguished Member Award за вклад в создание стохастических, гибридных и распределенных систем управления и выдающийся сервис Обществу систем управления, связанный с электронными публикациями и конференционной деятельностью.
В 2019 году она была повышена до стипендиата IEEE с 1 января 2020 года со следующей цитатой: «За вклад в теорию стохастических, гибридных и распределенных систем управления».
ESA — Системы управления
Для того, чтобы спутники или космические аппараты выполняли свою миссию, их ориентация и положение в космосе часто требуют чрезвычайно точного управления, выполняемого бортовыми системами управления.
Что такое домен «Системы управления»?
Техника управления фокусируется на моделировании динамических систем и разработке контроллеров с обратной связью, которые заставляют эти системы вести себя желаемым образом.
В системе управления с обратной связью набор датчиков контролирует выходные данные (например, направление наведения спутника или относительное положение космического корабля) и передает данные в компьютер, который непрерывно регулирует управляющий вход (через исполнительные механизмы) по мере необходимости, чтобы свести ошибку управления к минимуму (то есть, чтобы поддерживать желаемую ориентацию наведения или относительное положение).
Обратная связь о том, как работает система, позволяет контроллеру бортового компьютера динамически компенсировать нарушения в системе.Идеальная система управления с обратной связью устраняет все ошибки, эффективно смягчая воздействие любых сил, которые могут возникнуть во время работы, и вырабатывает реакцию в системе, которая полностью соответствует пожеланиям пользователя.
Космические приложения, которые охватывает эта дисциплина, включают в себя управление ориентацией и орбитой спутников, точное наведение антенн или оптических терминалов, а также в более общем плане наведение, навигацию и управление космическими аппаратами, которые должны выполнять специальные функции, такие как групповой полет и орбитальное сближение, посадка на астероиды и планетарные тела, а также повторный вход в атмосферу Земли.
Системы управления ориентацией и орбитой (AOCS) необходимы для всех космических миссий. Общий объем траектории спутника задается пусковой установкой, которая поднимает его в небо, — выбирается экспертами по орбитальной динамике задолго до постройки спутника, — после чего более мелкие двигатели выводят его на рабочую орбиту. После этого бортовая система управления с обратной связью отвечает за управление направлением наведения космического корабля — известным как его положение — по мере его движения по орбитальной траектории.
Проблема в том, что положение спутников изменяется по-разному, будь то аэродинамическое сопротивление внешних слоев атмосферы или гравитационное влияние Земли, или давление солнечного излучения, оказываемое на большие придатки, или взаимодействие между магнитным полем Земли и магнитными диполями спутников. Положение спутника также нарушается его собственным содержимым, которое может создавать нежелательные колебания жидкости в топливном баке, и колебания больших солнечных крыльев являются классическими примерами.
Возмущающим эффектам таких внешних и внутренних крутящих моментов необходимо противодействовать с помощью AOCS. Эта система включает в себя датчики для определения текущего положения спутника (например, гироскопы, стартовые датчики, датчики Солнца или магнитометры) и исполнительные механизмы (включая двигатели, реактивные колеса или магнитные вращающие механизмы) для запуска желаемых корректирующих вращений вокруг центра масс спутника.
Почему компьютерные системы важны?
Поставленные задачи многих космических аппаратов требуют, чтобы они поддерживали конкретное абсолютное и относительное наведение в пределах допустимых ошибок, и это достигается бортовой AOCS.Спутниковые антенны связи должны учитывать ошибки наведения в виде полуконуса для наземных станций и пользователей, в то время как космические астрономические обсерватории или спутники наблюдения Земли должны дополнительно обеспечивать высокую стабильность прямой видимости оптических или радиочастотных инструментов.
Аналогичным образом, системы наведения, навигации и управления (GNC) гарантируют, что планетарные зонды и транспортные средства должны сохранять не только свою ориентацию наведения, но также свое абсолютное или относительное положение в пространстве, чтобы достичь успешного сближения с целью или автономная и безопасная посадка на планетарное тело или для поддержания позиционирования с шестью относительными степенями свободы (DOF), когда речь идет о боевой миссии.В этом случае требуются специализированные датчики, такие как датчики сближения, лидарные или оптические навигационные камеры, радиочастотные и оптические метрологические системы.
Итак, AOCS / GNC является важной подсистемой — миссия будет преждевременно завершена, если она потерпит неудачу. Уровень производительности, требуемый от AOCS / GNC, варьируется от миссии к миссии: спутник связи, указывающий на наземную станцию, может требовать точности 0,1 градуса, в то время как космический телескоп, ищущий определенную астрономическую цель, должен быть в тысячи раз более точным.Полетные группы и миссии по посадке на планете, которые в настоящее время находятся на стадии планирования, также потребуют высокой точности для относительной навигации и позиционирования.
НравитьсяСпасибо за лайк
Вам уже понравилась эта страница, вам может понравиться только один раз!
Двухпозиционная система управления — x-engineer.org
На промышленном предприятии система управления с обратной связью выполняет роль поддержания измеренного физического сигнала на предварительно определенном уровне ( заданное значение ).Физический сигнал, также называемый управляемой переменной , может быть любого вида: электрическим (напряжение, ток, мощность), механическим (положение, скорость, сила, крутящий момент), гидравлическим (давление, расход) или тепловым (температура). Разница между контролируемой переменной (измеренной) и предварительно заданным значением называется ошибкой .
Вход контроллера — это ошибка, а выход контроллера — сигнал срабатывания, который отправляется на исполнительный механизм. Управляемая переменная дополнительно измеряется датчиком, и информация возвращается в контроллер.
Изображение: Система управления с обратной связью
Разница между уставкой и выходной мощностью объекта (измеренной) возникает из-за возмущений , которые влияют на установку (процесс). Роль контроллера состоит в том, чтобы отклонять эти возмущения и поддерживать выходную мощность установки (регулируемую переменную) на предварительно определенном значении (заданном значении).
Способы, которыми контроллер реагирует на ошибку, называются законами управления или режимами управления. В промышленных приложениях используется несколько законов управления, большинство из которых относятся к двухпозиционному, ПИД-регулированию или другим более сложным законам (нечетким, нейронечетким, оптимальным и т. Д.).
Двухпозиционное управление — это простейшая форма контроллера, который включается, когда ошибка положительная, и выключается, когда ошибка равна нулю или отрицательна. Двухпозиционный контроллер не имеет промежуточных состояний, а только полностью ВКЛЮЧЕНО или полностью ВЫКЛЮЧЕНО состояний. Из-за логики переключения, контроллер включения-выключения часто называют контроллером bang-bang или двухступенчатым контроллером .
Независимо от размера ошибки, выход двухпозиционного регулятора может быть либо полностью ВКЛЮЧЕН, либо полностью ВЫКЛЮЧЕН, он не пропорционален ошибке.
Возьмем для примера контроль температуры в промышленной духовке. Температура внутри духовки измеряется датчиком и возвращается на контроллер. В зависимости от погрешности (разница между заданной температурой и измеренной температурой) нагревательные элементы включаются или выключаются контроллером. У ТЭНа нет промежуточных значений, они полностью ВКЛЮЧЕНЫ или полностью ВЫКЛЮЧЕНЫ.
Изображение: Управление включением-выключением промышленных печей
Если мы сравним эту систему с общей системой с обратной связью, описанной выше, мы можем идентифицировать следующие элементы:
- контроллер: переключатель
- установка: печь
- обратная связь (измеренная выход): температура
Промышленная печь имеет две важные характеристики, которые необходимо объяснить, поскольку они влияют на реакцию контроллера:
- мертвое время
- емкость (инерция)
В большинстве систем управления с петля обратной связи, система не может мгновенно реагировать на какие-либо помехи, и требуется время (задержка), пока выход контроллера не повлияет на измеряемый (производственный) выход.Эта временная задержка известна как мертвое время . В случае промышленной печи, если дверца доступа открыта, требуется время, пока температура не упадет, контроллер определит разницу, включит нагреватели и температура вернется к заданному значению. Мертвое время скрывает помехи от контроллера и ограничивает его способность быстро реагировать.
Емкость системы рассматривается как сопротивление изменению входов. Чем выше емкость системы, тем больше времени требуется для реакции на изменения.{- \ tau \ cdot s} \ tag {1} \]
где:
K — усиление
T — постоянная времени
τ — мертвое время
Постоянная времени является мерой емкости системы. Чем выше постоянная времени, тем больше времени требуется системе, чтобы реагировать на изменение входных сигналов или помехи.
Если двухпозиционный контроллер настроен на управление процессом первого порядка с мертвым временем, выходной сигнал контроллера и установки (регулируемая переменная / температура) будет иметь следующее поведение.
Изображение: Пример двухпозиционного управления
Предположим, что заданная температура духовки составляет 120 ° C, а начальная температура равна 0 ° C. Мертвое время духовки 30 с.
Когда эта функция активирована, контроллер определяет разницу температур через обратную связь по температуре и включает ( 1 ) нагревательные элементы. Из-за мертвого времени только через 30 с, после включения ТЭНов, мы можем заметить повышение температуры. Повышение температуры не резкое, а медленное, и требуется около 300 с, пока температура не достигнет заданного значения.Когда температура выше 120 ° C, контроллер отключает ( 0 ) нагревательные элементы. Поскольку нагревательные элементы все еще горячие, температура в течение короткого времени продолжит повышаться, а затем понизится. Когда температура опускается ниже 120 ° C, двухпозиционный контроллер включает нагревательные элементы. Поскольку нагревательным элементам требуется время, чтобы достичь номинальной температуры, температура в духовке все равно на короткое время снизится, а затем повысится.
Как видите, двухпозиционный контроллер не может поддерживать постоянную температуру в духовке, но всегда поднимается выше и ниже заданного значения.Этот цикл вокруг заданного значения называется « охота ».
Изображение: выход управления вкл / выкл
Реакцию двухпозиционного контроллера можно резюмировать, как на изображении выше. Когда ошибка положительная, контроллер включается. Когда ошибка равна нулю или отрицательна, выход контроллера выключен.
Пример 1 . Реализуйте двухпозиционный контроллер для промышленной системы контроля температуры печи со следующими параметрами:
- Отклик разомкнутого контура печи при пошаговом входе: 180 ° C
- Постоянная времени печи: 240 с
- мертвое время процесс: 30 с
, который будет контролировать температуру для заданного значения 120 ° C.{- 30 \ cdot s} \ tag {2} \]
В Xcos завод можно смоделировать как передаточную функцию первого порядка с задержкой непрерывного исправления :
Изображение: Модель завода (промышленная печь)
Двухпозиционный контроллер может быть смоделирован в Xcos с помощью динамического переключателя , который может выводить функцию 1 (ВКЛ) или 0 (ВЫКЛ) знака температурной ошибки.
Изображение: Блок-схема двухпозиционного контроллера Xcos
Уставка определяется как блок константы .Погрешность рассчитывается как разница между заданным значением и текущим значением температуры (выходной сигнал установки). И модель установки, и двухпозиционный контроллер сгруппированы в блоки , определяемые пользователем функции .
Изображение: Блок-схема двухпозиционного управления Xcos
Моделирование выполняется в течение 1000 с. Выходной сигнал контроллера и выходной сигнал установки показаны на изображении ниже.
Изображение: График Xcos для двухпозиционного управления
Мы можем видеть, как двухпозиционный контроллер переключает выход с ВКЛ на ВЫКЛ около заданного значения.Постоянное переключение с высокой частотой около заданного значения может привести к перегрузке исполнительных механизмов и потенциальному выходу из строя. По этой причине большинство двухпозиционных регуляторов имеют встроенный гистерезис .
Двухпозиционный контроллер с гистерезисом будет переключаться не вокруг заданного значения, а между верхним и нижним пределом. Таким образом, частота переключения будет уменьшаться, но отклонение (выброс) от заданного значения увеличится.
Изображение: Двухпозиционное регулирование с выходом гистерезиса
Ошибка больше не сравнивается с нулем, а со значением гистерезиса.Чем выше значение гистерезиса, тем ниже частота переключения и выше выброс.
В нашем конкретном примере, если температура духовки установлена на 120 ° C, а гистерезис на 20 ° C, двухпозиционный контроллер выключится, когда температура выше 130 ° C, и включится, когда она станет меньше 110 ° С.
Пример 2 . Для той же установки, что и в примере 1, спроектируйте двухпозиционный контроллер с гистерезисом 20 ° C.
В этом примере в качестве двухпозиционного контроллера мы собираемся использовать стандартный блок Xcos Hysteresis со следующими параметрами:
- включить:
10 - выключить:
-10 - вывод при включении:
1 - вывод при выключении:
0
Изображение: Блок-схема управления гистерезисом включения-выключения Xcos
Моделирование выполняется для 1000 с.Выходной сигнал контроллера и выходной сигнал установки показаны на изображении ниже.
Изображение: График Xcos управления гистерезисом включения-выключения
Частота переключения контроллера уменьшилась, но отклонение температуры (выброс) вокруг заданного значения увеличилось. На практике для конкретного приложения гистерезис устанавливается для достижения наилучшего компромисса между частотой переключения и выбросом.
Вместо гистерезиса двухпозиционный контроллер может также иметь зону нечувствительности .Мертвая зона представляет собой нижний и верхний пределы ошибки, между которыми контроллер не реагирует. В этом случае контроллер будет иметь три состояния.
Изображение: Двухпозиционное регулирование с выходом зоны нечувствительности
В качестве приложения мы можем представить электродвигатель, которому необходимо примерно расположить компонент между некоторыми пределами. Двухпозиционный контроллер будет вращать двигатель вперед (FWD), назад (BWD) или ждать (IDLE). Если положение компонента находится между зоной нечувствительности, контроллер будет в состоянии IDLE.
Основными преимуществами двухпозиционных контроллеров являются: простота, дешевизна и цифровой выход (всего два состояния). Основные недостатки: регулируемый параметр будет постоянно переключаться вокруг заданного значения, и если гистерезис установлен неправильно, отклонение от заданного значения может быть весьма значительным.
Двухпозиционное регулирование в основном используется в некритических приложениях, где погрешность между заданным значением и выходной мощностью установки может варьироваться в относительно большой степени.Например, в системах контроля температуры для домов (отопление и охлаждение), морозильных камер и других бытовых приборов используется двухпозиционное регулирование.
Принцип работы двухпозиционного контроллера важен, потому что он закладывает основу для более сложных контроллеров. Понимание недостатков простого контроллера помогает на этапе проектирования более продвинутого контроллера.