классификация шума
Классификация шума
По источнику образования шум подразделяют на:
механический — создается колебаниями твердой или жидкой поверхности;
аэро- и гидродинамический — возникает в результате турбулентности соответственно газовой или жидкой среды;
электродинамический — обусловлен действием электро- или магнитодинамических сил, электрической дуги или коронного разряда.
По частоте различают шум низкочастотный (до 300 Гц), среднечастотный (от 300 до 800 Гц) и высокочастотный (более 800 Гц).
По характеру спектра шум бывает:
широкополосный — имеет непрерывный спектр шириной более одной октавы;
тональный — характеризуется неравномерным распределением звуковой энергии с преобладанием большей ее части в области одной-двух октав.
По времени действия различают следующие виды шума:
постоянный — изменяется в течение рабочей смены не более чем на 5 дБА в ту или иную сторону от среднего уровня;
непостоянный — уровень его звукового давления за
рабочую смену может меняться на 5 дБА и
более в любую сторону от среднего уровня.
Непостоянный шум, в свою очередь, можно подразделить на:
колеблющийся — с плавным изменением уровня звука во времени;
прерывистый — характеризуется ступенчатым изменением уровня звукового давления на более чем 5 дБА при длительности интервалов с постоянным уровнем давления звука не менее 1 с;
импульсный — состоит из одного или нескольких звуковых сигналов, продолжительность каждого из которых менее 1 с.
Классификацию шума важно учитывать при разработке мероприятий по снижению его вредного влияния на работающих. Например, определение источника возникновения шума и выработка соответствующих оптимальных мер противодействия, направленных на уменьшение уровня давления звука, создаваемого его генератором, способствуют повышению работоспособности людей и снижению их заболеваемости.
Определение
частотного спектра шума также важно
для обеспечения безопасности и гигиены
труда. Так, если низкочастотные звуки
распространяются в пространстве
сферически от источника их образования,
то высокочастотные — в виде узконаправленного
потока волн. Поэтому шум низкой частоты
легче проникает через неплотные преграды
и от него нельзя защититься экранированием,
которое особенно эффективно при борьбе
с распространением высокочастотного
шума. Неодинаковое действие на организм
человека различных видов шума учитывают
при его гигиеническом нормировании.
Поэтому шум низкой частоты
легче проникает через неплотные преграды
и от него нельзя защититься экранированием,
которое особенно эффективно при борьбе
с распространением высокочастотного
шума. Неодинаковое действие на организм
человека различных видов шума учитывают
при его гигиеническом нормировании.
По природе возникновения шумы машин или агрегатов делятся на:
· механические,
· аэродинамические и гидродинамические,
· электромагнитные.
На ряде
производств преобладает механический шум, основными источниками которого
являются зубчатые передачи, механизмы
ударного типа, цепные передачи, подшипники
качения и т.п. Он вызывается силовыми
воздействиями неуравновешенных
вращающихся масс, ударами в сочленениях
деталей, стуками в зазорах, движением
материалов в трубопроводах и т.п. Спектр
механического шума занимает широкую
область частот. Определяющими факторами
механического шума являются форма,
размеры и тип конструкции, число оборотов,
механические свойства материала,
состояние поверхностей взаимодействующих
тел и их смазывание. Машины ударного
действия, к которым относится, например,
кузнечно-прессовое оборудование,
являются источником импульсного шума,
причем его уровень на рабочих местах,
как правило, превышает допустимый. На
машиностроительных предприятиях
наибольший уровень шума создается при
работе металло- и деревообрабатывающих
станков
Машины ударного
действия, к которым относится, например,
кузнечно-прессовое оборудование,
являются источником импульсного шума,
причем его уровень на рабочих местах,
как правило, превышает допустимый. На
машиностроительных предприятиях
наибольший уровень шума создается при
работе металло- и деревообрабатывающих
станков
Аэродинамические и гидродинамические шумы:
·шумы, обусловленные периодическим выбросом газа в атмосферу, работой винтовых насосов и компрессоров, пневматических двигателей, двигателей внутреннего сгорания;
·шумы, возникающие из-за образования вихрей потока у твердых границ. Эти шумы наиболее характерны для вентиляторов, турбовоздуходувок, насосов, турбокомпрессоров, воздуховодов;
·кавитационный шум, возникающий в жидкостях из-за потери жидкостью прочности на разрыв при уменьшении давления ниже определенного предела и возникновения полостей и пузырьков, заполненных парами жидкости и растворенными в ней газами
Шумы электромагнитного происхождения возникают в различных электротехнических
изделиях (например при работе электрических
машин). Их причиной является взаимодействие
ферромагнитных масс под влиянием
переменных во времени и пространстве
магнитных полей. Электрические машины
создают шумы с различными уровнями
звука от 20¸30 дБ (микромашины) до 100¸110 дБ
(крупные быстроходные машины).
Их причиной является взаимодействие
ферромагнитных масс под влиянием
переменных во времени и пространстве
магнитных полей. Электрические машины
создают шумы с различными уровнями
звука от 20¸30 дБ (микромашины) до 100¸110 дБ
(крупные быстроходные машины).
4. Классификация шума
4.1 Классификация шума по источникам возникновения
Механический шум. Механический шум обусловлен колебаниями деталей машин и их взаимным перемещением. Возбуждение механического шума обычно носит ударный характер, излучающие его конструкции и детали представляют собой системы с многочисленными резонансными частотами. Поэтому спектр механического шума занимает широкую область частот. Наличие высоких частот делают шум особо неприятным.
Аэрогидродинамический
шум. Аэрогидродинамические
шумы возникают при движении газов и
жидкостей, их взаимодействия с твердыми
телами (шумы из-за периодического выпуска
газа в атмосферу, например, сирена, шумы
из-за образования вихрей, отрывных
течений, турбулентные шумы из-за
перемешивания потоков и т.
Электромагнитный шум. Электромагнитный шум возникает в электрических машинах и оборудовании из-за взаимодействия ферромагнитных масс под влиянием переменных (во времени и в пространстве) магнитных полей, а также сил, возникающие при взаимодействии магнитных полей, создаваемых токами.
Классификация по характеру спектра и временным характеристикам
В зависимости от спектра выделяют так называемый широкополосной, или белый шум, т.е. шум с непрерывным спектром шириной более одной октавы и тональный шум, в спектре которого имеются дискретные тона шириной менее одной октавы.
В зависимости от изменения по времени различают постоянный шум, под которым понимается шум, при котором

Непостоянные шумы в свою очередь делается на колеблющиеся во времени, прерывистые и импульсные (см. рис.5).
А – колеблющийся шум, б – прерывистый шум, в – импульсный шум Рис.55. Нормирование производственного шума
При нормировании шума используют два метода: нормирование по предельному спектру шума и нормирование уровня звука в дбА.
Нормирование по предельному спектру. Этот метод является основным для постоянных шумов. Здесь нормируются уровни звуковых давлений в 8 октавных полосах частот с fсг = 63, 125, 250…8000 Гц. Совокупность восьми допустимых уровней звукового давления и называется предельным спектром (ПС).
Для каждой категории рабочих мест (конструкторские бюро, лаборатории, цеха и т.п.) регламентирован свой предельный спектр шума. Допустимые уровни звукового давления на рабочих местах приведены в ГОСТ 12.1.001-83
Нормирование
уровня звука в дБА.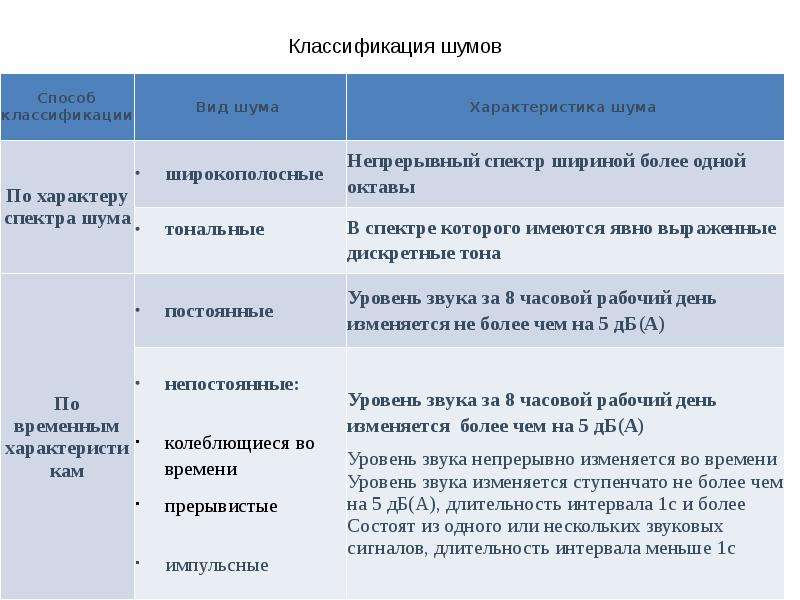 Этот метод используется для ориентировочной
оценки постоянного и непостоянного
шума, когда мы не знаем спектра шума.
Этот метод используется для ориентировочной
оценки постоянного и непостоянного
шума, когда мы не знаем спектра шума.
Уровень звука (дБА) связан с предельным спектром зависимостью: LA = ПС + 5
Для тонального и импульсного шумов допустимые уровни должны приниматься на 5 дБ меньше нормативных для постоянного шума.
Для оценки акустической энергии, воздействующей на человека за определенный период времени используется доза шума, скорректированная по частотной характеристике «А» шумомера Па2 r: D = PA2 T, где РА — звуковое давление, соответствующее измеренному уровню звука в дБА.
Допустимая доза шума — доза, соответствующая допустимому уровню звука или допустимому эквивалентному уровню звука.
Для непостоянного
шума нормированным параметром является
эквивалентный (по энергии) уровень звука
широкополосного, постоянного и
неимпульсного шума, оказывающего на
человека такое же воздействие, как и
непостоянный шум (Laэкв.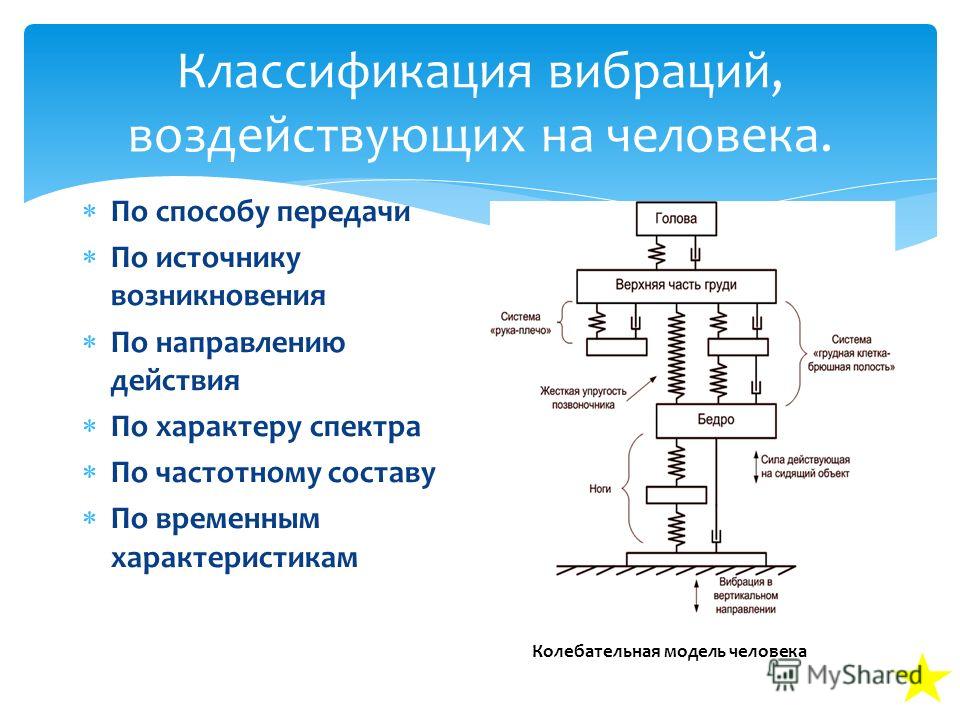 дБА.
Этот уровень измеряется специальными
интегрирующими шумомерами.
дБА.
Этот уровень измеряется специальными
интегрирующими шумомерами.
Ответы на все модули (для контрольного теста) по предмету безопасность жизнедеятельности.
Автор admin На чтение 12 мин. Просмотров 431 Опубликовано
Ответы на все модули (для контрольного теста) по предмету безопасность жизнедеятельности.
Ответы на модуль 1 (ЧРЕЗВЫЧАЙНЫЕ СИТУАЦИИ И БЕЗОПАСНОСТЬ ЖИЗНЕДЕЯТЕЛЬНОСТИ) по предмету безопасность жизнедеятельности.
1) Последствием какой катастрофы, как правило, является значительный экономический ущерб?
экологической катастрофы
2) Что такое авария?
происшествие в технической системе, не сопровождающееся гибелью людей, при котором восстановление технических средств невозможно или экономически нецелесообразно
3) Что такое чрезвычайная ситуация?
обстановка на определенной территории, сложившаяся в результате аварии, опасного природного явления, катастрофы, стихийного или иного бедствия, которые могут повлечь или повлекли за собой человеческие жертвы, ущерб здоровью людей или окружающей природной среде, значительные материальные потери и нарушение условий жизнедеятельности людей
4) Что такое экологическая катастрофа?
стихийное бедствие, крупная производственная или транспортная авария (катастрофа), которые привели к чрезвычайно неблагоприятным изменениям в сфере обитания и, как правило, к массовому поражению флоры, фауны, почвы, воздушной среды и в целом природы
5) Как классифицируются чрезвычайные ситуации в зависимости от источника?
на чрезвычайные ситуации мирного и военного времени
6) К какой группе принципов обеспечения безопасности относятся принципы блокировки, вакуумирования, герметизации, защиты расстоянием, компрессии, прочности, слабого звена, флегматизации, экранирования?
к техническим принципам
7) Как классифицируются опасности по характеру воздействия на человека?
на вредные и травмирующие
8) Что из перечисленного относится к природным опасным явлениям?
инфекционные болезни
9) Какой из четырех методических подходов к определению риска опирается на статистику, расчет частот, вероятностный анализ безопасности, построение «деревьев опасности»?
инженерный
10) Что такое безопасность в чрезвычайной ситуации?
состояние защищенности населения, объектов экономики и окружающей природной среды от опасностей в чрезвычайных ситуациях
11) Каковы прогнозы ученых относительно количества чрезвычайных ситуаций в ближайшие годы?
количество чрезвычайных ситуаций в ближайшие годы будет расти
12) Как называются чрезвычайные ситуации, которые являются следствием производственной и хозяйственной деятельности человека?
техногенные чрезвычайные ситуации
13) Что из перечисленного относится к гидродинамическим авариям?
прорыв плотин, дамб, шлюзов и т. д.
д.
14) Как называется пространство, в котором постоянно существуют или периодически возникают опасности?
ноксосфера
15) Как классифицируются опасности по источникам их возникновения?
на естественные и антропогенные
16) Каково соотношение рождаемости и смертности на сегодняшний день в России?
сегодня смертность в России превышает рождаемость в 1,7 раза
17) Что такое катастрофа?
происшествие в технической системе, сопровождающееся гибелью или пропажей без вести людей
18) По какому признаку опасности классифицируются на прогнозируемые и спонтанные?
по моменту возникновения
19) Каков максимально приемлемый уровень индивидуального риска гибели?
10-6 в год
20) Что из перечисленного не относится к чрезвычайным происшествиям?
дождь
21) Каких поражающих факторов не существует?
физических
22) Что такое вредный фактор?
негативное воздействие на человека, которое приводит к ухудшению самочувствия или заболеванию
23) Как называется состояние объекта, территории или акватории, как правило, после чрезвычайного происшествия, при котором возникает угроза жизни и здоровью для группы людей, наносится материальный ущерб населению и экономике, деградирует природная среда?
чрезвычайная ситуация
24) Что из перечисленного относится к техногенным авариям и катастрофам?
пожары, взрывы (в промышленных и жилых зданиях, шахтах, на химически и радиационно опасных объектах)
25) Что такое опасное природное явление?
стихийное событие природного происхождения, которое по своей интенсивности, масштабу распространения и продолжительности может вызвать отрицательные последствия для жизнедеятельности людей, экономики и природной среды
Ответы на модуль 2 (ПРИРОДНЫЕ И ТЕХНОГЕННЫЕ КАТАСТРОФЫ. ЧРЕЗВЫЧАЙНЫЕ СИТУАЦИИ ТЕРРОРИСТИЧЕСКОЙ УГРОЗЫ И ВОЕННОГО ВРЕМЕНИ) по предмету безопасность жизнедеятельности.
ЧРЕЗВЫЧАЙНЫЕ СИТУАЦИИ ТЕРРОРИСТИЧЕСКОЙ УГРОЗЫ И ВОЕННОГО ВРЕМЕНИ) по предмету безопасность жизнедеятельности.
1) Что из перечисленного не является признаком приближающегося землетрясения?
раскачивание листвы на деревьях
2) Какой тип пожарного извещателя формирует сигнал о пожаре при превышении скорости нарастания температуры окружающей среды выше установленного порогового значения?
дифференциальный тепловой пожарный извещатель
3) Каким количеством баллов оценивается слабое землетрясение, которое может быть зарегистрировано только с помощью приборов (по шкале Рихтера)?
0
4) Какой термин в области технических средств электробезопасности обозначает устройства, предотвращающие прикосновение или приближение на опасное расстояние к токоведущим частям?
защита от прикосновения к токоведущим частям
5) Какой сильный ветер называется ураганом (тайфуном)?
ветер огромной разрушительной силы скоростью 117 км/час и более, продолжительностью несколько суток, сопровождающийся выпадением большого количества осадков и понижением температуры воздуха
6) Как называется постепенный подъем уровня воды, вызванный весенним таянием снега?
половодье
7) Какое значение облучения эффективной дозой в течение года должно рассматриваться как потенциально опасное?
свыше 200 мЗв
8) Вправе ли кто-нибудь вмешиваться в действия руководителя тушения пожара или отменять его распоряжения при тушении пожара?
нет, никто не вправе
9) В каком случае производится контроль уровня электромагнитных излучений радиочастотного диапазона в производственных условиях?
при организации новых рабочих мест
10) Что представляет собой α-излучение?
поток ядер гелия
11) Что рекомендуется располагать вдоль линий электропередачи напряжением 500 кВ для снижения напряженности?
зеленые насаждения
12) Что такое оползень?
смещение масс горных пород по склону под воздействием собственной силы тяжести
13) Как называется территория вокруг источника ионизирующего излучения, на которой уровень облучения людей в условиях нормальной эксплуатации данного источника может превысить установленный предел дозы облучения населения?
санитарно-защитная зона
14) Каких вулканов не бывает?
дремлющих
15) Какая форма дозиметрического контроля заключается в определении максимальных уровней энергетических параметров лазерного излучения в точках на границе рабочей зоны?
предупредительный дозиметрический контроль
16) В чем заключается суть импактного мониторинга?
данный мониторинг обеспечивает наблюдения в особо опасных зонах и местах, непосредственно примыкающих к источникам загрязняющих веществ
17) Что из перечисленного имеет отношение к природным землетрясениям?
тектонические процессы в земной коре
18) Какие автоматические установки пожаротушения получили наибольшее распространение в нефтедобывающей, нефтеперерабатывающей, химической, нефтехимической промышленности, а также в металлургии, энергетике и на объектах, где в больших количествах применяются легковоспламеняющиеся и горючие жидкости?
установки пенного пожаротушения
19) Какое излучение обладает высокой проникающей способностью и представляет для человека наибольшую опасность из всех видов корпускулярного излучения?
нейтронное излучение
20) При какой дозе облучения возникает нижний уровень развития легкой формы лучевой болезни?
1 Зв
21) Что такое сель (селевой поток)?
внезапно возникающий в горных реках поток воды с высоким уровнем содержания (до 75%) камней, грязи, песка, грунта
22) Какие огнетушители наиболее эффективны при тушении загорания различных веществ и материалов при температуре окружающего воздуха от -25 до +50 °С, а также электрооборудования под напряжением?
углекислотные
23) Что из перечисленного относится к индивидуальным средствам защиты от инфракрасного излучения?
изолирующий костюм (для особых ремонтных работ)
24) Что такое гроза?
атмосферное явление, связанное с развитием мощных кучевых облаков, возникновением электрических разрядов (молний), сопровождающееся звуковым эффектом (громом), шквалистым усилением ветра, ливнем, градом, понижением температуры воздуха
25) Как называется состояние защищенности личности, имущества, общества и государства от пожаров?
пожарная безопасность
Ответы на модуль 3 (НЕГАТИВНЫЕ ПРОИЗВОДСТВЕННЫЕ ФАКТОРЫ И ОХРАНА ТРУДА) по предмету безопасность жизнедеятельности.
1) Что из перечисленного не относится к основным нормируемым показателям микроклимата воздуха?
чистота воздуха
2) Какое освещение осуществляется электрическими лампами?
искусственное освещение
3) Как называется объект, созданный человеком для обеспечения его социальных потребностей и не обладающий свойствами природных объектов (согласно ФЗ «Об охране окружающей среды»)?
антропогенный объект
4) Что относится к психофизиологическим опасным и вредным производственным факторам?
физические и эмоциональные перегрузки, умственное перенапряжение, монотонность труда
5) При каком количестве работников на предприятии создается служба охраны труда или вводится должность специалиста по охране труда?
более 100 работников
6) Какие средства индивидуальной защиты в соответствии с ГОСТом нужно использовать при необходимости кратковременного обслуживания действующего оборудования, генерирующего повышенные уровни шума и ультразвука?
антифоны
7) В течение какого срока комиссия по техническому расследованию причин аварии должна составить акт расследования и другие необходимые документы и материалы со времени происшествия?
в течение 10 дней
8) Как называется в акустике логарифмическая единица, отражающая десятикратную степень увеличения интенсивности звука над уровнем другого?
бел
9) Каков срок действия лицензии?
не менее пяти лет
10) Какую деятельность не может осуществлять аттестационная комиссия организации?
организацию ликвидации производственного участка в случае несоответствия его проектным параметрам и требованиям нормативных правовых актов
11) Как подразделяются шумы по характеру спектра?
на широкополосные и тональные
12) Как называется форма подтверждения соответствия объектов требованиям технических регламентов, положениям стандартов или условиям договоров?
сертификация
13) В каком случае рабочее место признается аттестованным?
при отсутствии на нем опасных и вредных производственных факторов
14) Как называется фактор, воздействие которого приводит к травме или к другому ухудшению здоровья?
опасный производственный фактор
15) Что из перечисленного не входит в оптическую область электромагнитного спектра?
невидимый свет
16) Какие нормативы установлены в соответствии с уровнями допустимого воздействия физических факторов на окружающую среду и при соблюдении которых обеспечиваются нормативы качества окружающей среды?
нормативы допустимых физических воздействий
17) Какой инструктаж проводится инженером по охране труда или лицом, назначенным приказом, со всеми принимаемыми на работу независимо от их образования, стажа работы или должности, а также с командированными, учащимися и студентами, прибывшими на практику, а в учебных заведениях ¾ перед началом лабораторных и практических работ?
вводный инструктаж
18) Какой орган обеспечивает государственный надзор и контроль за соблюдением требований охраны труда?
федеральная инспекция труда
19) Какие случаи временного понижения слуха принято считать адаптацией к шуму?
не более чем на 10…15 дБ с восстановлением его в течение 3 мин после прекращения действия шума
20) Какое освещение осуществляется за счет прямого и отраженного света неба?
естественное освещение
21) Какие параметры микроклимата обеспечивают ощущение теплового комфорта и создают предпосылки для высокого уровня работоспособности?
оптимальные параметры
22) На кого рекомендуется возлагать функции лица, ответственного за осуществление производственного контроля, если численность занятых на опасных производственных объектах работников составляет от 150 до 500 человек?
на специально назначенного работника
23) На кого возлагаются обязанности по обеспечению безопасных условий и охраны труда?
на работодателя
24) Каковы сроки проведения последующей аттестации (в том случае, если условия труда не менялись)?
не реже одного раза в пять лет с момента проведения последних измерений
25) Какого обозначения для параметров микроклимата в производственных помещениях не существует?
приемлемые параметры
Ответы на модуль 4 (ОРГАНИЗАЦИЯ ЗАЩИТЫ НАСЕЛЕНИЯ И ТЕРРИТОРИЙ В ЧРЕЗВЫЧАЙНЫХ СИТУАЦИЯХ И ОКАЗАНИЯ ПОМОЩИ ПОСТРАДАВШИМ) по предмету безопасность жизнедеятельности.
1) Какие мероприятия, призванные решать задачи гражданской обороны объекта, предусматривают разработку и планирование действий руководящего, командно-начальствующего состава отдела по делам ГОЧС, служб и НАСФ по защите персонала объекта, проведению аварийно-спасательных и других неотложных работ, восстановлению производства, а также по выпуску продукции на сохранившемся оборудовании?
организационные мероприятия
2) Что такое гражданская оборона?
система мероприятий по подготовке к защите и по защите населения, материальных и культурных ценностей на территории РФ от опасностей, возникающих при ведении военных действий или вследствие этих действий, а также при возникновении чрезвычайных ситуаций природного и техногенного характера
3) Какое объектовое формирование предназначено для проведения спасательных работ на объекте?
спасательная команда
4) При какой работоспособности профессиональные обязанности в сфере умственной работы выполняются, однако число ошибочных действий составляет 10-15%, выполнение тяжелой физической работы затруднено (снижено на 50% от исходного уровня)?
при ограниченной работоспособности
5) Какие раны возникают под воздействием тупого ранящего орудия большой массы или обладающего большой скоростью?
ушибленные раны
6) Каким сигналом население предупреждается о непосредственной опасности поражения противником данного района (налет авиации, артобстрел)?
«Воздушная тревога»
7) Что предполагает профилактика возникновения источников чрезвычайной ситуации?
проведение заблаговременных мероприятий по недопущению и (или) устранению причин и предпосылок возникновения источников чрезвычайной ситуации антропогенного происхождения, а также по ограничению ущерба от них
8) Какие мероприятия, призванные решать задачи гражданской обороны объекта, предусматривают повышение устойчивости работы объекта путем таких изменений технологических процессов, которые способствовали бы обеспечению бесперебойного выпуска продукции, а также исключали бы возникновение вторичных факторов поражения?
технологические мероприятия
9) Как называется организованный вывод и (или) вывоз персонала объектов экономики, членов их семей и населения из зон чрезвычайной ситуации или вероятной чрезвычайной ситуации?
эвакуация
10) В каком случае в мирное время устанавливается режим повседневной деятельности (один из режимов функционирования РСГЗ)?
при нормальной производственно-промышленной, радиационной, химической, биологической (бактериологической), сейсмической и гидрометеорологической обстановке, при отсутствии эпидемий, эпизоотий, эпифитотий и пожаров
11) Какой контроль необходим для первичной диагностики степени тяжести лучевой болезни облученных?
индивидуальный контроль
12) Что не относится к основным методам защиты от воздействия поражающих факторов источников ЧС?
передвижение
13) Какое требование безопасности при пользовании эскалатором метро сформулировано неверно?
стоять с левой стороны лицом по направлению движения
14) Какое правило поведения в случае аварии с АХОВ при нахождении в жилом доме, квартире сформулировано неверно?
защитите органы дыхания сухим полотенцем или другой тканью
15) Как называется форма участия граждан в организации предупреждения пожаров и их тушения в населенных пунктах и на предприятиях?
добровольная пожарная охрана
16) Какое правило поведения в случае автомобильной аварии сформулировано неверно?
пассажиры должны быстро сгруппироваться, лечь на пол или на сидение, защитить голову руками, накрыть детей своим телом и расслабиться
17) Какие подсистемы РСЧС создаются в субъектах РФ для предупреждения и ликвидации чрезвычайных ситуаций в пределах их территории и состоят из звеньев, соответствующих административному делению этих территорий?
территориальные подсистемы
18) При каком методе защиты от поражающих факторов источников ЧС поражающее действие определяется значением следующих параметров мощностью экспозиционной дозы излучения и длительностью его действия?
при защите от ионизирующих излучений
19) Какое правило поведения при пожаре сформулировано неверно?
открыть все окна и двери
20) В чем заключается суть принципа комплексности проведения мероприятий защиты?
все мероприятия по защите в ЧС должны выполняться, по возможности, параллельно с привлечением максимально возможного количества сил и средств
21) Какая служба является основным видом пожарной охраны и входит в МЧС России в качестве единой, самостоятельной оперативной службы?
Государственная противопожарная служба
22) Где осуществляется обучение населения, не занятого в сферах производства и образования (неработающего населения), мерам защиты в чрезвычайных ситуациях?
по месту жительства (при ДЭЗах, ЖЭКах, клубах и т. п.)
п.)
23) Какой уровень структуры органов РСЧС сформулирован неверно?
субъектовый
24) Как подразделяются формирования гражданской защиты (ГЗ) по срокам (степени) готовности?
на формирования повышенной и обычной готовности
25) К какой группе мероприятий защиты объектов экономики и населения относятся предупреждение чрезвычайных ситуаций; планирование защиты ОЭ и населения от ЧС; создание фондов средств защиты, разведки, профилактики и обеззараживания; обучение (подготовка) населения мерам защиты от ЧС; подготовка сил и средств для ликвидации последствий ЧС?
к предупредительным мероприятиям
3.3. Требования к шуму на рабочем месте оператораспециальных и специализированных транспортных средств
3.3.1. Характер шума
3.3.1.1. По характеру спектра шум подразделяется на:
широкополосный с непрерывным спектром шириной более одной октавы;
тональный, в спектре которого имеются выраженные дискретные тона.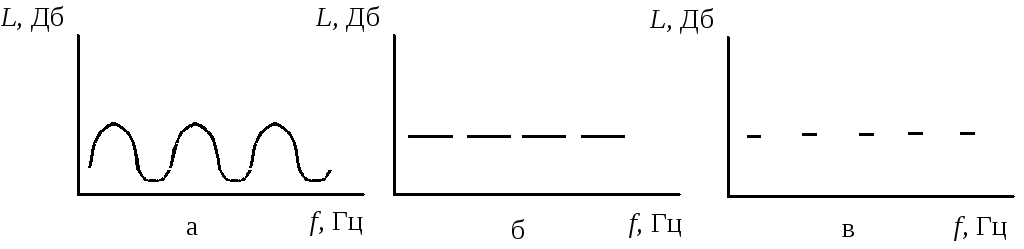 Тональный характер шума для практических целей (при контроле его параметров на рабочих местах) устанавливают измерением в третьоктавных полосах частот по превышению уровня звукового давления в одной полосе над соседними не менее чем на 10 дБ.
Тональный характер шума для практических целей (при контроле его параметров на рабочих местах) устанавливают измерением в третьоктавных полосах частот по превышению уровня звукового давления в одной полосе над соседними не менее чем на 10 дБ.
3.3.1.2. По временным характеристикам шум подразделяется на:
постоянный, уровень звука которого за восьмичасовой рабочий день (рабочую смену) изменяется во времени не более чем на 5 дБ А при измерениях на временной характеристике «медленно» шумомера;
непостоянный, уровень звука которого за восьмичасовой рабочий день (рабочую смену) изменяется во времени более чем на 5 дБ А при измерениях на временной характеристике «медленно» шумомера.
3.3.1.3. Непостоянный шум подразделяется на:
колеблющийся во времени, уровень звука которого непрерывно изменяется во времени;
прерывистый, уровень звука которого ступенчато изменяется (на 5 дБ А и более), причем длительность интервалов, в течение которых уровень остается постоянным, составляет 1 с и более;
импульсный, состоящий из одного или нескольких звуковых сигналов, каждый длительностью менее 1 с, при этом уровни звука, измеренные в дБ AI и дБ А соответственно на временных характеристиках «импульс» и «медленно» шумомера, отличаются не менее чем на 7 дБ.
3.3.2. Характеристики и допустимые уровни шума на рабочих местах
3.3.2.1. Характеристикой постоянного шума на рабочих местах являются уровни звукового давления L в дБ в октавных полосах со среднегеометрическими частотами 31,5; 63; 125; 250; 500; 1000; 2000; 4000; 8000 Гц.
3.3.2.2. Допускаемые уровни звукового давления в октавных полосах частот и уровни звука на рабочих местах следует принимать:
3.3.2.2.1. Для широкополосного постоянного и непостоянного (кроме импульсного) шума — по таблице 3.3.1;3.3.2.2.2. Для тонального и импульсного шума — на 5 дБ меньше значений, указанных в таблице 3.3.1.
Таблица 3.3.1
Уровни звукового давления, дБ, в октавных полосах со среднегеометрическими частотами, Гц | Уровни звука, дБ А | ||||||||
3. 3.2.3. Шумовые характеристики машин или предельные значения шумовых характеристик должны быть указаны в паспорте на них, руководстве (инструкции) по эксплуатации или другой сопроводительной документации.
3.2.3. Шумовые характеристики машин или предельные значения шумовых характеристик должны быть указаны в паспорте на них, руководстве (инструкции) по эксплуатации или другой сопроводительной документации.
Открыть полный текст документа
Оптимизация адаптивного фильтра MTI
Международный журнал коммуникаций, сетевых и системных наук Том 10, № 08 (2017), Идентификатор статьи: 78397,12 стр.
10.4236 / ijcns.2017.108B022
Оптимизация адаптивного фильтра MTI
Wenxu Zhang, Shudi Ma, Qiuying Du
Колледж информационных и коммуникационных технологий, Харбинский инженерный университет, Харбин, Китай
Поступила: 31 мая 2017 г . ; Принята в печать: 11 августа 2017 г .; Опубликовано: 14 августа 2017 г.
; Принята в печать: 11 августа 2017 г .; Опубликовано: 14 августа 2017 г.
РЕФЕРАТ
Индикация движущихся целей (MTI) является эффективным средством для радиолокационного обнаружения движущихся целей в условиях помех.В этой статье представлены основные принципы MTI, как избежать проблемы слепой скорости и оптимизация фильтра MTI. Реализация многопозиционного адаптивного фильтра индикации движущейся цели (AMTI), который разработан с использованием кода смещения в различных случаях, который основан на оптимизации метода вектора признаков.
Ключевые слова:
Adaptive Moving Target Indication (AMTI), Stagger Code, Feature Vector Method, Multi-Notch
1. Введение
Полосовой фильтр MTI как «одноканальный» с последующим обнаружением относительно просто.Когда целевая скорость велика, а частота повторения низкая, убедитесь, что нет размытия расстояния, с помощью цикла повторения переменной недели или повторения и “изменения времени” [1]. Может преодолеть проблему слепой скорости, недостатком является отсутствие улучшения шума. В общем, беспорядок не очень сильный, радар может обрабатывать ограниченное количество импульсов, подходит для использования повторяющейся и изменяющейся во времени системы взвешивания. У адаптивного есть множество способов достижения, в которых производительность лучше «первого порядка» и «второго порядка».Базовый метод первого порядка состоит в использовании измерения скорости на основе интервалов и метода распределения нулевой точки для определения весовых параметров фильтра подавления помех для получения фильтра, отметка которого совпадает с центром спектра помех [2] . Его преимущества проще, недостатком является то, что он не может адаптироваться к спектру помех, поэтому иногда производительность хуже. Базовый метод второго порядка заключается в оценке ковариационной матрицы препятствий с последующим использованием метода инверсии матрицы или разложения признаков вектора признаков для определения весового коэффициента фильтра.
Может преодолеть проблему слепой скорости, недостатком является отсутствие улучшения шума. В общем, беспорядок не очень сильный, радар может обрабатывать ограниченное количество импульсов, подходит для использования повторяющейся и изменяющейся во времени системы взвешивания. У адаптивного есть множество способов достижения, в которых производительность лучше «первого порядка» и «второго порядка».Базовый метод первого порядка состоит в использовании измерения скорости на основе интервалов и метода распределения нулевой точки для определения весовых параметров фильтра подавления помех для получения фильтра, отметка которого совпадает с центром спектра помех [2] . Его преимущества проще, недостатком является то, что он не может адаптироваться к спектру помех, поэтому иногда производительность хуже. Базовый метод второго порядка заключается в оценке ковариационной матрицы препятствий с последующим использованием метода инверсии матрицы или разложения признаков вектора признаков для определения весового коэффициента фильтра.
В этой статье сначала анализируется индикация движущейся цели (MTI), на этой основе MTI оптимизируется, и соответствующие коэффициенты фильтра разрабатываются методом вектора признаков, который может эффективно подавлять помехи. И использование фильтра MTI конструкции с шахматным кодом для устранения влияния слепой скорости. Для помех от движения спектральный центр не находится на нулевой частоте и изменяется во времени. Чтобы подавить такой беспорядок, в этой статье используется метод адаптивного подавления помех от движения AMTI и разрабатывается многоточечный фильтр AMTI [3].
2. Исследование алгоритма адаптивного подавления помех
Самый ранний фильтр MTI — это компенсатор линии задержки, который в настоящее время является одним из наиболее часто используемых фильтров MTI. В соответствии с разным количеством отмен, но также делится на компенсатор с одной линией задержки, компенсатор с двойной линией задержки и компенсатор с множественной задержкой [4].
Компенсатор с одиночной линией задержки Как показано на рисунке 1, импульсная характеристика компенсатора с одиночной линией задержки выражается как, а выходной сигнал равен свертке между импульсной характеристикой и входом [5].
Импульсная характеристика счетчика:
(1)
Коэффициент усиления по мощности компенсатора одиночной линии задержки составляет:
(2)
Двойной компенсатор линии задержки, как показано на рисунке 2. Реакция двойного компенсатора линии задержки Компенсатор линии задержки:
(3)
Импульсная характеристика компенсатора двойной линии задержки:
(4)
Фильтр адаптивной индикации движущейся цели (AMTI) обычно состоит из FIR-фильтра с горизонтальной структурой.Выходной сигнал фильтра MTI:
(5)
, где — вектор весовых коэффициентов, а — вектор входного сигнала. Частотная характеристика этого фильтра:
(6)
В радиолокационной системе, чтобы избежать появления слепых эффектов, обычно используется подход «переменной T», то есть путем регулярного изменения пускового импульса радара. период так, чтобы частота слепоты была больше целевой возможной доплеровской частоты. Адаптивное подавление помех совместимо с параметрическими методами, что означает, что фильтр подавления помех должен быть изменяющимся во времени. Для определенного значения частотная характеристика фильтра MTI определяется только вектором весов, поэтому вычисление вектора весов является ядром процесса MTI, согласно различным методам проектирования оптимальный вектор весов обычно отличается. В инженерной практике коэффициент улучшения часто используется для измерения производительности системы MTI. Коэффициент улучшения фильтра MTI определяется как. Очевидно, что чем больше, тем лучше эффект системы по подавлению помех.Было доказано, что оптимальный весовой вектор фильтра MTI должен быть собственным вектором, соответствующим минимальному собственному значению ковариационной матрицы входных помех, чтобы максимизировать средний коэффициент улучшения MTI. На данный момент коэффициент улучшения равен [6].
Для определенного значения частотная характеристика фильтра MTI определяется только вектором весов, поэтому вычисление вектора весов является ядром процесса MTI, согласно различным методам проектирования оптимальный вектор весов обычно отличается. В инженерной практике коэффициент улучшения часто используется для измерения производительности системы MTI. Коэффициент улучшения фильтра MTI определяется как. Очевидно, что чем больше, тем лучше эффект системы по подавлению помех.Было доказано, что оптимальный весовой вектор фильтра MTI должен быть собственным вектором, соответствующим минимальному собственному значению ковариационной матрицы входных помех, чтобы максимизировать средний коэффициент улучшения MTI. На данный момент коэффициент улучшения равен [6].
2.1. Оптимальный дизайн фильтра
Так называемый оптимизационный дизайн требует набора оптимальных коэффициентов фильтра, чтобы максимизировать коэффициент улучшения, множества методов проектирования. В случае переменной T лучшими методами являются метод векторов признаков, алгоритм сопоставления, метод распределения нулевой точки и метод линейного прогнозирования [7]. Метод вектора признаков — это решение, которое минимизирует выходную мощность помех, когда целевое усиление является постоянным. Метод назначения нулевой точки заключается в установке нуля частотной характеристики в режекции при разработке полосового фильтра. Алгоритм согласования и метод линейного прогнозирования — это решения, которые минимизируют выходную мощность помех, когда один из элементов вектора весов является постоянным. Таким образом, метод вектора признаков имеет лучшую производительность [8].
Метод вектора признаков — это решение, которое минимизирует выходную мощность помех, когда целевое усиление является постоянным. Метод назначения нулевой точки заключается в установке нуля частотной характеристики в режекции при разработке полосового фильтра. Алгоритм согласования и метод линейного прогнозирования — это решения, которые минимизируют выходную мощность помех, когда один из элементов вектора весов является постоянным. Таким образом, метод вектора признаков имеет лучшую производительность [8].
Метод вектора признаков — это метод подавления помех, основанный на максимальном коэффициенте улучшения.
Обычно предполагается, что помехи имеют гауссовский спектр мощности, спектральный центр, ширина спектра и функция спектральной плотности:
(7)
Согласно теории фильтра Винера, если помехи равны стационарный случайный процесс, его спектр мощности и автокорреляционная функция являются парами преобразования Фурье. Следовательно, автокорреляционная функция препятствий является преобразованием Фурье его спектра мощности.
(8)
— соответствующее время.Если центр спектра препятствий равен нулю, то
(9)
Мы получаем матрицу автокорреляции препятствий A из N импульсов
(10)
, доплеровский спектр эхо-сигнала цели может быть выражен как
(11)
Целевая функция автокорреляции:
(12)
Предположим, что данные о помехах и целевые данные входного N-импульсного MTI соответственно равны
(13)
(14)
Затем выход MTI мощности помех и мощности сигнала равны
(15)
(16)
, где и представляют мощность помех, а мощность сигнала на входе фильтра MTI, соответственно, является вектором весов FIR-фильтра.Согласно определению коэффициента улучшения фильтра MTI
(17)
Таким образом, для единичного массива
(18)
Характеристическое уравнение:
(19)
, где собственный вектор, соответствующий собственному значению. Среди них
В собственных значениях подпространство собственного вектора, соответствующее большому собственному значению, является подпространством сигнала, и основные точки помех расположены в этом подпространстве. Подпространство собственного вектора, соответствующее малому собственному значению, является подпространством шума. Поскольку подпространство шума ортогонально подпространству сигнала, собственный вектор B, соответствующий минимальному собственному значению, принимается как весовой вектор фильтра MTI, это может подавить компонент помех в наибольшей степени, что является самым большим фактором улучшения [9] .
Подпространство собственного вектора, соответствующее малому собственному значению, является подпространством шума. Поскольку подпространство шума ортогонально подпространству сигнала, собственный вектор B, соответствующий минимальному собственному значению, принимается как весовой вектор фильтра MTI, это может подавить компонент помех в наибольшей степени, что является самым большим фактором улучшения [9] .
2.2. Частота последовательного повторения
Как правило, невозможно получить частоту повторения импульсов, которая может соответствовать требуемому неоднозначному расстоянию и доплеровскому охвату.Поэтому предлагается метод ступенчатого повторения. Частота повторения поочередно — это мера, которую можно использовать для предотвращения слепого влияния [10].
Если радар использует N частот повторения, их периоды повторения могут быть выражены как
(20)
— максимальный условный период для, тогда отношение шансов:
(21)
— это ступенчатый код, Отношение наибольшего значения к минимальному значению в параметрическом коде называется максимальным отношением азимутального цикла.
(22)
Если взаимно отличается и удовлетворяет уравнению (22), то первая истинная слепая скорость соответствует доплеровской частоте.
(23)
Средний период повторения радара составляет
(24)
— среднее значение разницы. Следовательно,
(25)
(26)
Поскольку это средняя частота повторения радара, она также вызывается для коэффициента слепого расширения.
Коэффициент фильтра MTI между импульсами различается для каждого импульса трехимпульсного компенсатора, поэтому это изменяющийся во времени фильтр.Если радар использует три частоты повторения, одновременно по очереди работают три набора фильтров MTI. Глубина ступенчатой режекции отклика скорости фильтра MTI не зависит от формы компенсатора и не зависит от импульса, принятого в луче антенны радара, и связана с максимальным отношением азимутального цикла. Чем больше максимальный коэффициент изменения, тем меньше соответствующая глубина надреза.
2.3. Оптимизация адаптивного фильтра MTI
В области помех оценивается спектральный центр помех от движения во входном сигнале для получения оценки доплеровской частоты центра спектра помех. Затем оцените спектральную ширину, чтобы получить оценочное значение спектральной ширины. Затем мы получаем весовой коэффициент многоточечного фильтра, используя полученную оценку и метод вектора признаков, и проектируем MTI-фильтр с многоточечным фильтром. Как показано на рисунке 3.
Затем оцените спектральную ширину, чтобы получить оценочное значение спектральной ширины. Затем мы получаем весовой коэффициент многоточечного фильтра, используя полученную оценку и метод вектора признаков, и проектируем MTI-фильтр с многоточечным фильтром. Как показано на рисунке 3.
Сначала оцените движение центра спектра помех.
Радар страдает от узкополосных помех и помех, которые можно выразить как
(27)
Рисунок 3.Оптимизация дизайна адаптивного фильтра MTI.
— амплитуда, — доплеровская частота препятствий, — начальная фаза и — аддитивный шум. Шум не связан с помехами, и шум между разными PRI не коррелирован.
Задержка сигнала после PRI
(28)
Корреляционная функция и равна
(29)
Таким образом, получается оценка центральной частоты спектра помех.
(30)
После получения центральная частота спектра помех, оценка ширины спектра выполняется интегральным методом.
В сочетании со спектром Гаусса есть гауссовы спектры мощности
(31)
— частотная дисперсия гауссова спектра мощности, является центром спектра мощности и представляет собой соответствующий спектр мощности на нулевой доплеровской частоте. В соответствии с определением точек половинной мощности
В соответствии с определением точек половинной мощности
В соответствии с характером распределения Гаусса имеется
(32)
До предполагаемого спектра в качестве центра по обе стороны от центра накопленного спектра мощности помех (соответствующих интеграция), до 95.44% для энергетического порога, а затем используя соотношение между спектральной шириной и спектральной шириной для спектральной оценки Гаусса. После получения предполагаемого спектрального центра и оценки ширины спектра весовой коэффициент фильтра получается с использованием метода вектора признаков.
Было обнаружено, что спектр мощности представляет собой сумму их соответствующих спектров мощности для ошеломляющих помех из множества гауссовых спектров. Автокорреляционная функция также должна иметь сумму соответствующих составляющих множества препятствий.Таким образом, мы можем получить весовые коэффициенты двух или более режекторных фильтров для разработки многоточечного AMTI-фильтра.
3. Моделирование и анализ производительности
Моделирование и анализ производительности
На рисунке 4, очевидно, частотная характеристика компенсатора одиночной линии задержки и компенсатора двойной линии задержки изменяется циклически, а период равен. Пик появляется в, а нулевое значение появляется в. Как
(a) (b)
Рис. 4. Нормированная частотная характеристика компенсатора одиночной линии задержки и опоры двойной линии задержки.(а) дБ. (б) Вольт.
Как видно из рисунка, компенсатор с двойной линией задержки имеет более глубокую выемку и более плоскую полосу пропускания, чем компенсатор с одиночной линией задержки.
На рисунке 5 частотная характеристика все еще циклическая, когда T равно. Из рисунка ясно видно, что глубина провала значительно увеличена по сравнению с компенсатором линии задержки, характеристика полосы пропускания также более плоская, и одновременно может быть установлена частота провалов.
На рисунке 6 можно увидеть, что использование ступенчатой частоты повторения может значительно улучшить первую слепую скорость. Чем больше коэффициент смещения, тем светлее
Чем больше коэффициент смещения, тем светлее
(a) (b)
Рис. 5. Нормализованная частотная характеристика фильтра MTI. (а) Центр спектра помех: 0 Гц. (b) Центр спектра помех: 50 Гц.
соответствует насечке и позволяет избежать потери слабых целей в одной из них.
На рисунке 7 показана нормализованная частотная характеристика фильтра MTI, разработанного с использованием метода вектора признаков, длина фильтра 4 порядка, средняя частота повторения импульсов 100 Гц, коэффициент смещения 15:16:17, центр препятствия. спектр выбран равным 0 Гц и 50 Гц соответственно, ширина спектра равна 0.64 Гц. Фильтр имеет очень глубокую выемку на компоненте помех, вся полоса пропускания относительно плоская и эффективно подавляет слепую скорость.
На рисунке 8 длина фильтра 4 порядка, средняя частота повторения импульсов 100 Гц, коэффициент смещения 15:16:17. Центральная частота помех составляет 0 Гц,
(a) (b)
Рис. 6. Нормированная частотная характеристика трехимпульсного дифференциального регистра.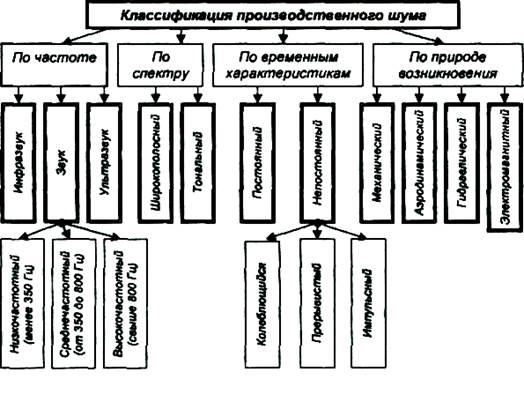 (а) Соотношение сторон: 13:16:19. (b) Передаточное число: 15:16:17.
(а) Соотношение сторон: 13:16:19. (b) Передаточное число: 15:16:17.
спектральная ширина равна 0.64 Гц, центральная частота метеорологических помех 30 Гц, ширина спектра 1,4 Гц. Как видно из рисунка, при 0 Гц и 30 Гц с более глубоким вырезом можно подавить помехи.
4. Заключение
В процессе приема эхо-сигнала радаром наличие сигнала помех мешает обнаружению и извлечению полезного сигнала, необходимо подавить помехи. Техника индикации движущейся цели (MTI) обладает хорошей способностью подавлять статические помехи, но бессильна для динамических помех.Использование адаптивной технологии может эффективно подавить динамический
(a) (b)
Рисунок 7. Нормализованная частотная характеристика для фильтра 15: 16: 17MTI. (а) Центр спектра помех: 0 Гц. (b) Центр спектра помех: 50 Гц.
беспорядок. В этой статье мы предлагаем алгоритм обработки AMTI, основанный на максимальном среднем коэффициенте улучшения, и даем соответствующую форму волны моделирования MATLAB. В частности, с разработкой микросхемы DSP скорость обработки была улучшена, что сделало этот метод очень подходящим для практического применения.
В частности, с разработкой микросхемы DSP скорость обработки была улучшена, что сделало этот метод очень подходящим для практического применения.
Благодарности
Эта работа частично поддержана Национальным фондом естественных наук Китая в рамках грантов № 61301205 и № 61571146, Национальная оборонная наука
Рис. 8. Нормализованная частотная характеристика многоточечного адаптивного MTI (AMTI) .
Исследовательская программа в рамках гранта № JCKY2013604B001. Этот документ финансируется Программой международного обмена Харбинского инженерного университета по развитию инновационных талантов.
Процитируйте эту статью
Zhang, W.X., Ma, S.D. и Ду, Q.Y. (2017) Оптимизация адаптивного фильтра MTI. Int. J. Коммуникации, сети и системные науки, 10, 206-217. https://doi.org/10.4236/ijcns.2017.108B022
Ссылки
- 1. Geng, F.L. (2006) Принцип радара. Сианьский университет электронной науки и техники Press, Сиань.
- 2.
 Wu, S.J. и Мэй, X.C. (2008) Технология обработки радиолокационных сигналов и данных. Electronic Industry Press, Пекин, 106-134.
Wu, S.J. и Мэй, X.C. (2008) Технология обработки радиолокационных сигналов и данных. Electronic Industry Press, Пекин, 106-134. - 3.Юань, B.H., Zhang, W.X. и Чжун, X.K. (2017) Реконфигурируемый многоканальный радиолокационный передатчик на основе SDR. Прикладная наука и технологии.
- 4. Chen, J.C., Geng, F.L. (1999) Адаптивная техника подавления движущегося беспорядка. J Xi’an Electronics Technology University, 26, 174–177.
- 5. Янг Р. (2012) Для алгоритма оптимизации когнитивного радара и алгоритма смещенного фильтра. Сианьский университет электронных наук и технологий.
- 6. Вс, К., Ли, М. и Тао, Х.Х. (2014) Разработка градиентного фильтра MTI на основе алгоритма градиентного иммунитета. Журнал Китайского института электронных наук и технологий, 1673-5692.
- 7. Малановски М. (2006) Сравнение адаптивных методов удаления помех в радаре PCL. Международный радарный симпозиум, Краков, 24–26 мая 2006 г., стр. 1–4.
 https://doi.org/10.1109/IRS.2006.4338044
https://doi.org/10.1109/IRS.2006.4338044 - 8. Ху, Л. (2013) Применение алгоритма EMD для подавления помех от радаров. Сианьский университет электронных наук и технологий.
- 9. Чжу В. (2010) Исследование и внедрение MTI и MTD в некоторых радарах VHF. Сианьский университет электронных наук и технологий.
- 10. Ху К.Х. (2006) Применение метода адаптивного подавления помех в радаре. Современная электронная техника, 29, 24-26.
Прикладные науки | Бесплатный полнотекстовый | Обзор методов извлечения физических и перцептивных характеристик речи, музыки и звуков окружающей среды
1.Введение
Наделение машин сенсорными способностями, аналогичными человеческим (например, зрением, слухом, осязанием, обонянием и вкусом), — это давно преследуемая цель в нескольких областях инженерии и информатики. В идеале мы хотели бы, чтобы машины и компьютеры знали свое непосредственное окружение, как люди. Таким образом, они смогут произвести наиболее подходящий ответ для данной операционной среды, сделав один шаг вперед к полному и естественному взаимодействию человека и машины (например,g., делая полностью автономных роботов осведомленными об окружающей их среде), улучшать доступность людей с особыми потребностями (например, за счет разработки слуховых аппаратов с возможностью распознавания окружающей среды) или даже в качестве средства для замены людей в различных задачах (например, , автономное вождение, в потенциально опасных ситуациях и т. д.).
Таким образом, они смогут произвести наиболее подходящий ответ для данной операционной среды, сделав один шаг вперед к полному и естественному взаимодействию человека и машины (например,g., делая полностью автономных роботов осведомленными об окружающей их среде), улучшать доступность людей с особыми потребностями (например, за счет разработки слуховых аппаратов с возможностью распознавания окружающей среды) или даже в качестве средства для замены людей в различных задачах (например, , автономное вождение, в потенциально опасных ситуациях и т. д.).
Один из основных каналов человеческого восприятия — это слух. Таким образом, в стремлении заставить компьютеры воспринимать окружающую среду как человек, восприятие акустической среды в широком смысле является ключевой задачей.Однако акустическое окружение конкретной точки пространства может быть чрезвычайно сложно декодировать для машин, будь то из-за одновременного присутствия источников звука самого разного происхождения (естественного или искусственного происхождения) или из-за многих других причин, таких как как наличие высокого фонового шума или существование большого расстояния до источника звука, и это лишь некоторые из них.

Как читатель, возможно, догадался, машинный слух — чрезвычайно сложная и устрашающая задача, учитывая большое разнообразие возможных аудиовходов и сценариев применения. По этой причине она обычно подразделяется на более мелкие подзадачи, и большая часть исследовательских усилий сосредоточена на решении более простых и конкретных задач.Такого упрощения можно добиться с разных точек зрения. Одна из этих точек зрения связана с природой интересующего звукового сигнала. Действительно, разработка универсальной машинной слуховой системы, способной успешно обрабатывать различные типы звуков, независимо от их природы, является действительно сложной задачей. Напротив, становится проще разрабатывать системы, способные выполнять конкретную задачу, но ограниченные сигналами определенной природы, поскольку конструкция системы может быть адаптирована и оптимизирована для учета характеристик сигнала.
Например, мы можем сосредоточиться на речевых сигналах, то есть звуках, издаваемых голосовым трактом человека, которые влекут за собой определенное лингвистическое содержание. Речь имеет набор очень отличительных черт, которые отличают ее от других типов звуков, от характерного спектрального распределения до фонетической структуры. В этом случае литература содержит множество работ, посвященных темам, связанным с распознаванием речи, таким как обнаружение речи (Бах и др. [5]), распознавание и идентификация говорящего (Киннунен и Ли [6]) и распознавание речи (Пиераччини [ 7]), и это лишь некоторые из них.Как и в случае с речью, музыка также представляет собой структурированный звук, который имеет набор специфических и отличительных черт (таких как повторяющиеся стационарные структуры паттернов, таких как мелодия и ритм), которые делают его довольно уникальным, создаваемым людьми с некоторыми эстетическими намерениями. По аналогии с речью музыка — это еще один тип звука, который привлек внимание исследователей при разработке систем машинного слуха, включая те, которые нацелены на конкретные задачи, такие как идентификация исполнителя и песни (Ван [8]), классификация жанров ( Wang et al.[9]), распознавание инструментов (Benetos et al. [10], Liu and Wan [11]), классификация настроения (Lu et al. [12]) или музыкальные аннотации и рекомендации (Fu [13]). и музыка, которая до сих пор была наиболее широко изученным типом источников звука в контексте машинного слуха, имеет несколько довольно уникальных характеристик. Напротив, другие виды источников звука, исходящие из нашей окружающей среды (например, шум транспорта, звуки животных в природе и т. Д.), Не проявляют таких особенностей или, по крайней мере, не так четко.Тем не менее, эти звуки, не связанные с речью или музыкой (далее обозначаемые как звуки окружающей среды), также должны обнаруживаться и распознаваться слуховыми аппаратами как отдельные события (Чу и др. [14]) или как акустические сцены (Валеро и Алиас [15]). (последние также можно найти в литературе, обозначенной как саундскейпы, как в работе Schafer [16]).Независимо от конкретной цели, любой аппаратный слуховой аппарат требует проведения глубокого анализа входящего аудиосигнала с целью максимально эффективного использования его конкретных характеристик.Этот анализ начинается с извлечения соответствующих параметров аудиосигнала, которые информируют о его наиболее важных характеристиках, — процесс, который обычно называют извлечением звуковых характеристик.
Логично, что извлечение правильных характеристик из аудиосигнала является ключевым моментом, гарантирующим успех приложений для машинного слуха. Действительно, извлеченные признаки должны обеспечивать компактное, но описательное представление параметризованного сигнала, выделяя те характеристики сигнала, которые наиболее полезны для выполнения поставленной задачи, будь то обнаружение, идентификация, классификация, индексирование, поиск или распознавание.И, конечно же, в зависимости от природы сигнала (то есть речи, музыки или звука окружающей среды) и целевого приложения, будет более интересным, чтобы эти извлеченные признаки отражали характеристики сигнала с физической или перцепционной точки зрения.
В этой статье представлен современный обзор основных методов извлечения звуковых характеристик, применяемых к машинному слуху. Мы основываемся на полном обзоре функций аудио-извлечения, подготовленном Митровичем и др. [17], и мы включили в эту работу классические подходы для полноты картины.Кроме того, мы представляем последние достижения в области методов извлечения звуковых характеристик вместе с новыми примерами их применения для анализа речи, музыки и звуков окружающей среды. Стоит отметить, что большинство недавно разработанных техник звуковых функций, представленных в последнее десятилетие, повлекло за собой определение новых подходов к анализу, выходящих за рамки классических областей (то есть временного, частотного и кепстрального), таких как те, которые были разработаны на область вейвлетов, помимо представления основанных на изображениях и полилинейных или нелинейных представлений, вместе со значительным увеличением биологических предложений.Эта статья организована следующим образом. В разделе 2 описываются основные составляющие любой машинной слуховой системы, уделяя внимание процессу извлечения звуковых характеристик. Более того, учитывая важность соотнесения природы сигнала с типом извлеченных признаков, мы подробно описываем основные характеристики трех наиболее часто встречающихся типов сигналов, используемых в приложениях машинного слуха: речь, музыка и звуки окружающей среды. Далее, в Разделе 3 описывается следующая таксономия для описания как классических, так и недавно определенных методов извлечения звуковых характеристик.Далее, описание обоснования и основных принципов подходов, основанных на физических характеристиках аудиосигнала, описывается в Разделе 4, а те, которые пытаются каким-то образом включить восприятие в процесс параметризации, объясняются в Разделе 5. Наконец, Раздел 6 обсуждаются выводы этого обзора.2. Машинный слух
Как упоминалось ранее, проблема наделения машин способностью воспринимать их акустическую среду обычно решается путем решения конкретных подзадач, таких как обнаружение, идентификация, классификация, индексация, поиск или распознавание определенных типов звука. события, сцены или композиции.Среди них речь, музыка и звуки окружающей среды составляют подавляющее большинство акустических стимулов, которые мы в конечном итоге можем найти в данном контексте машинного слухового аппарата.
В этом разделе мы сначала представляем краткое описание основных целей и характеристик составляющих блоков общей архитектуры машинных слуховых систем. Затем подробно описываются основные характеристики аудиоисточников, которые обрабатываются этими системами, то есть речь, музыка и звуки окружающей среды.
2.1. Архитектура машинных слуховых систем
Независимо от конкретного вида решаемой проблемы, структура базовой системы может быть описана с помощью общей и общей архитектуры, которая изображена на рисунке 2.На первом этапе непрерывная аудиопоток, захваченный микрофоном, сегментируется на более короткие фрагменты сигнала с помощью процесса управления окнами. Это достигается путем скольжения оконной функции по теоретически бесконечному потоку выборок входного сигнала и в конечном итоге преобразованием его в непрерывную последовательность конечных блоков выборок.Благодаря работе с окнами система сможет работать с фрагментами выборки конечной длины. Более того, в зависимости от продолжительности оконной функции, обычно нестационарный аудиосигнал можно считать квазистационарным в пределах каждого кадра, что облегчает последующий анализ сигнала.
Выбор типа и длины оконной функции, а также перекрытие между последовательными сигнальными кадрами тесно связаны с имеющимся приложением машинного слуха. Кажется логичным, например, что длина оконной функции должна быть пропорциональна минимальной длине интересующих акустических событий.Поэтому окна длиной от 10 до 50 миллисекунд обычно используются для обработки речи или обнаружения переходных шумовых событий [13], в то время как окна в несколько секунд используются в приложениях вычислительного анализа слуховых сцен (CASA) (как в работах Peltonen et al. [18], Чу и др. [14], Валеро и Алиас [15] или Гейгер и др. [19]). Дальнейшее обсуждение оконного процесса и его влияния на оконный сигнал выходит за рамки данной работы. Заинтересованного читателя отсылают к классическим текстам по цифровой обработке сигналов (например, к текстам).g., см. книгу Оппенгейма и Шафера [20]). После того, как входящий аудиопоток был сегментирован на фрагменты конечной длины, звуковые характеристики извлекаются из каждого из них. Цель выделения признаков состоит в том, чтобы получить компактное представление наиболее характерных акустических характеристик сигнала, преобразовав кадр длиной N отсчетов в K скалярных коэффициентов (с K << N), таким образом достигнув уплотнения данных, которое позволяет повысить эффективность последующие процессы [13]. С этой целью эти функции могут учитывать физическое или перцепционное влияние содержания сигнала, рассчитанного по времени, частоте и т. Д.В этом смысле было обнаружено, что моделирование эволюции звуковых сигналов во времени имеет первостепенное значение, когда дело доходит до выполнения некоторых типов задач машинного слуха, таких как распознавание звуков окружающей среды (как описано Гайги [21]) или идентификация ритмических паттернов в музыке (Фут и Учихаши [22]), например. Чтобы сохранить эту временную информацию, признаки, извлеченные из нескольких последовательных сигнальных кадров, могут быть объединены в один вектор признаков. Следует отметить, что из-за этого процесса слияния признаков векторы признаков приобретают очень высокую размерность, которая может представлять препятствие для последующего процесса аудиоанализа с так называемой проблемой размерности проклятия, как описано Беллманом [23] .Чтобы сжать векторы признаков, методы извлечения признаков иногда сопровождаются процессом уменьшения размерности данных. С этой целью можно рассмотреть несколько подходов: от представления векторов с точки зрения некоторой их статистики (как это сделано в работах Rabaoui et al. [24] или Hurst [25]) до более сложных подходов, таких как анализ основных компонентов. вектора признаков (Эронен и др. [26]), таким образом проецируя данные на преобразованное пространство.И, наконец, задача анализа звука должна выполняться на векторах признаков, полученных на предыдущем шаге.Конечно, аудиоанализ — это общий ярлык, который пытается охватить любую обработку звука, необходимую для работы с конкретным приложением для машинного слуха. Например, в случае, если целью нашего слухового аппарата было распознавание определенного типа звука, этот блок анализа звука будет состоять из контролируемого алгоритма машинного обучения, который должен сначала построить репрезентативные акустические модели на нескольких выборках из каждого звукового класса, которые мы хотим система для распознавания, чтобы впоследствии классифицировать любой поступающий неизвестный звуковой сигнал в один из предопределенных классов на основе информации, полученной во время фазы обучения алгоритма.
Конечно, для каждого приложения машинного слуха потребуется, чтобы блок анализа звука был разработан в соответствии с потребностями и требованиями конкретного приложения. Хотя предоставление читателю исчерпывающего представления о конкретных проблемах машинного слуха выходит за рамки данной работы, заинтересованный читатель найдет в статье разнообразные примеры приложений машинного слуха. Примеры включают идентификацию говорящего (как в Yuo et al. [27]), классификацию музыкальных жанров (Tzanetakis and Cook [28]), распознавание звуков окружающей среды (например,g., работы Андо [29] и Валеро и Алиас [30]), аудиоиндексация и поиск (Ричард и др. [31]) или CASA (как в работах Пелтонена и др. [18], Чу и др. [14], Валеро и Алиас [15]).2.2. Ключевые различия между речью, музыкой и звуками окружающей среды
Что касается аудиовхода, который должен обрабатывать аппаратный слуховой аппарат, речь, музыка и звуки окружающей среды имеют определенные характеристики. Ключевые различия можно непосредственно наблюдать как во временной, так и в частотной областях, а также в структуре и семантике сигнала.Затем эти различия можно параметризовать, используя физический или перцепционный подход, в зависимости от целевого приложения.
Во-первых, музыкальные и речевые сигналы имеют определенную периодичность, которую можно наблюдать при анализе этих сигналов во временной области (см. Рисунок 3). Хотя, за некоторыми исключениями (например, некоторые звуки природы, такие как щебетание птиц или звуки сверчка), периодичность звуков окружающей среды может быть не столь очевидной. Во-вторых, при анализе в частотной области в целом можно определить, что сложность спектра звуков окружающей среды (например,g., звук проезжающей машины) заметно больше, чем у речевых или музыкальных сигналов, как показано на рисунке 4. Более того, можно заметить, что речевые и музыкальные сигналы обычно представляют гармонические структуры в своих спектрах, что является признаком того, что не так часто встречается в звуках окружающей среды, как упоминалось ранее. В-третьих, обратите внимание, что звуки речи и музыки состоят из ограниченного словаря звуковых единиц: фонем и нот соответственно. Напротив, диапазон звуков окружающей среды теоретически бесконечен, поскольку любой звук, возникающий в окружающей среде, может быть включен в эту категорию (т.е., происходящие от шума, искусственных или естественных источников звука, см. рисунок 1).Кроме того, между этими типами сигналов существует ключевое различие. В речи и музыке фонемы и музыкальные ноты комбинируются, чтобы получить значимые последовательности, которые фактически передают конкретное семантическое или эстетическое сообщение. Напротив, последовательности звуков окружающей среды не подчиняются никаким правилам или предопределенной грамматике, хотя они могут передавать какой-то смысл (например, щебетание птиц или звуки сверчка).В отличие от речи и музыки неизвестна и другая важная информация, такая как продолжительность звуковых событий или соотношение гармонической и негармонической спектральной структуры.
Наконец, в таблице 1 представлена сводка конкретных характеристик речи, музыки и звуков окружающей среды с точки зрения нескольких факторов. Учитывая заметные различия между природой этих звуков, исследовательское сообщество предложило различные методы извлечения признаков, адаптированные к особенностям этих звуков.Однако в некоторых работах также используются хорошо зарекомендовавшие себя подходы для создания аналогичных систем в смежных областях исследований, например, путем заимствования функций, показывающих хорошие характеристики для анализа речи и / или музыкальных звуков, для параметризации звуков окружающей среды.В следующих разделах основное внимание уделяется центральной теме этой работы, представляя углубленный обзор методов извлечения звуковых характеристик, разделенных в зависимости от их физической или перцепционной основы, вместе с некоторыми конкретными приложениями машинного слуха, ориентированными на анализ речи. музыка или звуки окружающей среды.
3. Таксономия звуковых функций и обзор методов извлечения
Существует множество подходов для извлечения важных функций из аудиовхода машинного слухового аппарата. С одной стороны, мы можем найти те подходы, которые посвящены только извлечению физических характеристик аудиовхода. Эти методы извлечения различаются в зависимости от области применения, начиная от классических временных, частотных или кепстральных доменов до получения признаков на основе других недавних представлений.В частности, речь, музыка и звуки окружающей среды обычно имеют богатые изменяющиеся во времени характеристики с очень разнообразным содержанием (как показано на рисунке 3), которые можно параметризовать в этой области, например, вычисляя из проанализированного входного кадра скорость смены знака, основная периодичность, мощность или амплитуда сигнала и т. д. Более того, динамические изменения этих аудиосигналов могут представлять релевантную информацию в преобразованной области, например, посредством преобразования Фурье (см. рисунок 4), в кепстральной или вейвлетной областях, или из собственных подпространств или даже через нелинейные представления, из которых специфические особенности, связанные с e.g., спектр, гармоничность, линейное предсказание или фазовое пространство могут быть извлечены. С другой стороны, мы можем найти те методы, которые пытаются явно интегрировать восприятие в процесс параметризации или получить его через вычисление характеристик сигнала, способных извлекать перцептуально. соответствующие аспекты входящего звука, как описано Ричардом и др. [31]. Первые обычно включают в процесс параметризации упрощенные модели прослушивания слуховой системы (например, путем рассмотрения от банков фильтров Барка, Мела или гамматона до более сложных моделей, основанных на электроэнцефалограммах).Этот био-вдохновленный подход должен учитывать целевые виды машинного слухового аппарата, будучи адаптированным к реакции улитки этого вида, например, людей или животных (см. Работу Клеминса и др. [32,33]). . Последний подход к внедрению восприятия во время процесса извлечения признаков основан на вычислении низкоуровневых признаков, которые каким-то образом объясняют высокоуровневое ощущение звукового сходства, которое было подтверждено перцептивно (Ричард и др. [31]), например относящиеся к временным или частотным доменам (например,g., громкость, высоту звука, ритм и т. д.), или полученные из вычисления функции автокорреляции и модели слухового образа, например. В этой работе мы организуем обзор наиболее актуальных и новейших методов извлечения звуковых характеристик. найдены в литературе после иерархической таксономии, изображенной на рисунке 5. Эта таксономия основана на таксономии, представленной в обзоре Mitrović et al. [17]. Сначала мы классифицируем методы, дифференцируя подходы, основанные на физике, от подходов, основанных на восприятии, а затем разделяем их в соответствии с областью параметризации: время, частота, вейвлет, основанный на изображениях, кепстральный или другие области.Важно подчеркнуть, что основная цель этого документа — предоставить читателю широкий обзор существующих подходов к извлечению звуковых характеристик. Подробный математический анализ и критическое сравнение функций выходит за рамки и задачи нашей работы. Читателя, интересующегося математическим описанием звуковых характеристик, отсылаем к работам Петерса [34] и Шарана и Мойра [35]. Кроме того, сравнения между несколькими типами функций можно найти в других работах.Некоторые из этих работ сосредоточены на сравнении производительности нескольких функций в контексте различных приложений машинного слуха, таких как распознавание звука [36] или поиск музыки [37]. Наконец, в работе Hengel и Krijnders [38] представлено сравнение характеристик звуковых функций, таких как их устойчивость к шуму и спектрально-временные детали.6. Выводы
В этой работе представлен современный обзор наиболее актуальных методов извлечения звуковых характеристик, связанных с машинным слухом, которые были разработаны для анализа речи, музыки и звуков окружающей среды.С целью предоставить автономный справочник для практиков в области аудиоанализа, этот обзор охватывает самые элементарные и классические подходы к извлечению звуковых функций, начиная с 1970-х годов, и заканчивая самыми последними работами по созданию звуковых функций на основе новые области вычислений и биологические парадигмы.
С этой целью мы пересматриваем классические методы извлечения аудиофайлов, взяв полную работу Mitrović et al. [17] в качестве справочного материала и расширить эти подходы с учетом последних достижений в этой области исследований.Помимо расширения этого обзора функциями, вычисленными во временной, частотной и кепстральной областях, мы описываем методы выделения признаков, вычисленные в областях вейвлета и изображения, полученные из полилинейных или нелинейных параметризаций, вместе с теми, которые получены из конкретных представлений, таких как машинное преследование. алгоритма или параметризации Херста. Более того, стоит отметить, что также описано значительное количество новых предложений, вдохновленных биологией (например, включая слуховые модели, такие как банки фильтров Mel и Gammatone, или полученные из вычисления функции автокорреляции или модели слухового образа). .Описанные методы извлечения звуковых характеристик классифицируются в зависимости от того, имеют ли они физическую или перцептивную основу.Стоит упомянуть, что увеличение сложности в области параметризации звука, особенно в отношении более поздних подходов к восприятию и биоиндуцированных подходов, затрудняет получение четкой систематики, которая учитывала бы все предложения, найденные в литературе. Например, для организации некоторых из описанных функций восприятия может быть применена другая перспектива, выходящая за рамки предложенной таксономии звуковых функций.
Конкретно, многие характеристики восприятия основаны на получении первого набора функций, которые пытаются имитировать систему физического резонанса в улитке с использованием наборов фильтров с определенными частотными положениями и полосами пропускания (например, функции восприятия области изображения, кепстральные характеристики на основе банков фильтров восприятия. , карты слуховой заметности, некоторые особенности восприятия на основе вейвлетов или большинство частотных характеристик восприятия на основе модуляции).
Более того, некоторые из этих основанных на восприятии подходов определяют второй этап для получения набора значимых характеристик, которые в некотором смысле коррелируют с психоакустическими реакциями из предыдущего представления на основе спектрограмм.В некоторых случаях эти функции второго этапа являются производными от 2D-обработки на основе ядра (например, в функциях восприятия на основе вейвлетов), в то время как другие подходы предлагают более сложные этапы обработки (например, карты слуховой заметности).
Кроме того, описание основных концепций и принципов, лежащих в основе всех рассмотренных методов извлечения признаков, учитывает специфические особенности трех основных рассматриваемых типов входных аудиосигналов: речь, музыка и звуки окружающей среды. Кроме того, мы включили несколько классических и недавних примеров, чтобы проиллюстрировать применение этих методов в некоторых конкретных проблемах, связанных с машинным слухом, например.g. для речи: сегментация, распознавание, проверка / идентификация говорящего или идентификация языка; для музыки: аннотация, рекомендация, классификация жанров, распознавание инструментов, идентификация песни или классификация настроения; для звуков окружающей среды: распознавание, классификация, аудионаблюдение или компьютерный анализ звуковой сцены, среди прочего.
Наконец, мы хотели бы отметить, что эта работа была написана не как исчерпывающий сборник всех существующих методов извлечения звуковых характеристик, связанных с аудиоанализом, а как попытка сопоставить современные подходы, найденные в литературе по этому вопросу. динамическое поле исследований.Кроме того, мы ожидаем, что новые работы, предлагающие инновационные подходы к машинному слуху, потребуют разработки новых методов извлечения звуковых характеристик, которые расширят эту работу.
Звуковые волны | PASCO
Что такое звук
В физиологии звук возникает, когда вибрации объекта проходят через среду, пока не попадают в барабанную перепонку человека. В физике звук создается в виде волны давления. Когда объект вибрирует, он заставляет молекулы окружающего воздуха вибрировать, инициируя цепную реакцию колебаний звуковой волны во всей среде.В то время как физиологическое определение включает восприятие звука субъектом, физическое определение признает, что звук существует независимо от восприятия человеком. Вы можете узнать этот раздел из нашего сообщения в блоге «Что такое звуковая волна в физике?» Продолжайте читать, чтобы подробнее узнать о звуковых волнах.
Типы звука
Есть много разных типов звука, включая слышимый, неслышимый, неприятный, приятный, тихий, громкий, шум и музыку. Вы, вероятно, найдете звуки, издаваемые пианистом, мягкими, слышимыми и музыкальными.И хотя звук дорожных работ рано утром в субботу тоже слышен, он, конечно, не из приятных или мягких. Другие звуки, например свист собаки, не слышны человеческому уху. Это связано с тем, что собачий свист производит звуковые волны, которые находятся ниже диапазона человеческого слуха от 20 Гц до 20 000 Гц. Волны ниже 20 Гц называются инфразвуковыми волнами (инфразвук), а более высокие частоты выше 20 000 Гц известны как ультразвуковые волны (ультразвук).
Инфразвуковые волны (Инфразвук)
Инфразвуковые волны имеют частоты ниже 20 Гц, что делает их неслышными для человеческого уха.Ученые используют инфразвук для обнаружения землетрясений и извержений вулканов, для картирования подземных горных пород и нефтяных образований, а также для изучения активности человеческого сердца. Несмотря на нашу неспособность слышать инфразвук, многие животные используют инфразвуковые волны для общения в природе. Киты, бегемоты, носороги, жирафы, слоны и аллигаторы — все используют инфразвук для связи на впечатляющих расстояниях — иногда на сотни миль!
Ультразвуковые волны (ультразвук)
Звуковые волны с частотой выше 20,00 Гц производят ультразвук.Поскольку ультразвук происходит на частотах за пределами диапазона человеческого слуха, человеческое ухо не слышит его. Ультразвук чаще всего используется медицинскими специалистами, которые используют сонограммы для исследования внутренних органов своих пациентов. Некоторые менее известные применения ультразвука включают навигацию, визуализацию, смешивание образцов, обмен данными и тестирование. В природе летучие мыши излучают ультразвуковые волны, чтобы определять местонахождение добычи и избегать препятствий.
Как производится звук?
Звук издается, когда объект вибрирует, создавая волну давления.Эта волна давления заставляет частицы в окружающей среде (воздух, вода или твердое тело) совершать колебательные движения. Когда частицы вибрируют, они перемещают соседние частицы, передавая звук дальше через среду. Человеческое ухо улавливает звуковые волны, когда вибрирующие частицы воздуха вызывают колебания мелких деталей внутри уха.
Во многом звуковые волны похожи на световые. Оба они происходят из определенного источника и могут распространяться или рассеиваться различными способами. В отличие от света, звуковые волны могут проходить только через среду, такую как воздух, стекло или металл.Это значит, что в космосе нет звука!
Как распространяется звук?
Средние
Прежде чем мы обсудим, как распространяется звук, важно понять, что такое среда и как она влияет на звук. Мы знаем, что звук может распространяться через газы, жидкости и твердые тела. Но как они влияют на его движение? Звук наиболее быстро распространяется через твердые тела, потому что его молекулы плотно упакованы вместе. Это позволяет звуковым волнам быстро передавать колебания от одной молекулы к другой.Звук движется в воде аналогичным образом, но его скорость более чем в четыре раза выше, чем в воздухе. Скорость звуковых волн, движущихся в воздухе, может быть дополнительно снижена за счет высоких скоростей ветра, которые рассеивают энергию звуковой волны.
Среды и скорость звука
Скорость звука зависит от типа среды, через которую проходят звуковые волны. В сухом воздухе при 20 ° C скорость звука 343 м / с! В морской воде комнатной температуры звуковые волны распространяются со скоростью около 1531 м / с! Когда физики наблюдают возмущение, которое распространяется быстрее, чем местная скорость звука, это называется ударной волной.Когда сверхзвуковой самолет пролетает над головой, может наблюдаться локальная ударная волна! Как правило, в более теплых условиях звуковые волны распространяются быстрее. Как вы думаете, как это повлияет на скорость звуковых волн в океане, когда океан нагревается из-за глобального климата?
Распространение звуковых волн
Когда объект вибрирует, он создает кинетическую энергию, которая передается молекулами в среде. Когда вибрирующая звуковая волна входит в контакт с частицами воздуха, кинетическая энергия передается ближайшим молекулам.Когда эти возбужденные молекулы начинают двигаться, они активируют другие молекулы, которые повторяют этот процесс. Представьте себе обтягивающего человека, спускающегося по лестнице. При падении с лестницы движение обтяжки начинается с расширения. Когда первое кольцо расширяется вперед, оно тянет вперед кольца позади себя, вызывая волну сжатия. Эта цепная реакция толкания и тяги заставляет каждое кольцо катушки обтягивания смещаться из своего исходного положения, постепенно передавая исходную энергию от первой катушки к последней.Сжатие и разрежение звуковых волн подобны толканию и вытягиванию спиралей обтекателя.
Компрессия и разрежение
Звуковые волны состоят из моделей сжатия и разрежения. Сжатие происходит, когда молекулы плотно упакованы вместе. В качестве альтернативы разрежение происходит, когда молекулы удалены друг от друга. Когда звук проходит через среду, его энергия заставляет молекулы двигаться, создавая чередующиеся модели сжатия и разрежения.Важно понимать, что молекулы не движутся со звуковой волной. По мере прохождения волны молекулы получают энергию и перемещаются из своих исходных положений. После того, как молекула передает свою энергию соседним молекулам, движение молекулы уменьшается, пока на нее не воздействует другая проходящая волна. Передача энергии волной — это то, что вызывает сжатие и разрежение. При сжатии давление высокое, а при разрежении — низкое. Разные звуки создают разные модели изменений высокого и низкого давления, что позволяет их идентифицировать.Длина волны звуковой волны складывается из одного сжатия и одного разрежения.
Звуковые волны теряют энергию при прохождении через среду, что объясняет, почему вы не слышите людей, говорящих на большом расстоянии, но вы можете слышать их шепот поблизости. Когда звуковые волны движутся в пространстве, они отражаются такими средами, как стены, столбы и камни. Это звуковое отражение более известно как эхо. Если вы когда-нибудь были в пещере или каньоне, вы, вероятно, слышали, как ваше эхо распространяется намного дальше, чем обычно.Это связано с тем, что большие каменные стены отражают ваш звук друг от друга.
Типы волн
Итак, какой тип волны является звуковой? Звуковые волны делятся на три категории: продольные волны, механические волны и волны давления. Продолжайте читать, чтобы узнать, что их квалифицирует как таковые.
Продольные звуковые волны
Продольная волна — это волна, в которой движение частиц среды параллельно направлению переноса энергии. Звуковые волны в воздухе и жидкостях — это продольные волны, потому что частицы, переносящие звук, колеблются параллельно направлению распространения звуковой волны.Если вы толкаете обтяжку вперед и назад, катушки будут двигаться параллельно (вперед и назад). Точно так же при ударе по камертону направление звуковой волны параллельно движению частиц воздуха.
Механические звуковые волны
Механическая волна — это волна, которая зависит от колебаний вещества, что означает, что она передает энергию через среду для распространения. Эти волны требуют первоначального ввода энергии, которая затем проходит через среду до тех пор, пока не будет эффективно передана начальная энергия.Примеры механических волн в природе включают водные волны, звуковые волны, сейсмические волны и внутренние водные волны, которые возникают из-за разницы плотности в водоеме. Есть три типа механических волн: поперечные волны, продольные волны и поверхностные волны.
Почему звук — это механическая волна? Звуковые волны движутся по воздуху, вытесняя частицы воздуха в цепной реакции. Когда одна частица смещается из положения равновесия, она толкает или притягивает соседние молекулы, заставляя их смещаться из положения равновесия.Поскольку частицы продолжают перемещать друг друга с помощью механических колебаний, возмущение распространяется по среде. Эти межчастичные механические колебания звуковой проводимости квалифицируют звуковые волны как механические волны. Звуковая энергия или энергия, связанная с вибрациями, создаваемыми вибрирующим источником, требует перемещения среды, что превращает звуковую энергию в механическую волну.
Беспроводной датчик звука
Беспроводной датчик звука включает в себя два основных датчика в одном портативном корпусе: датчик звуковой волны для измерения относительных изменений звукового давления и датчик уровня звука со шкалами, взвешенными как в дБА, так и в дБВ.Благодаря отчетности в реальном времени и широкому диапазону дисплеев (БПФ, осциллограф, цифры) простой дизайн беспроводного датчика звука упрощает его использование для вводных звуковых исследований, а его встроенная память и надежные программные функции поддерживают исследования более высокого уровня звука.Звуковые волны давления
Волна давления или волна сжатия имеет регулярную структуру областей высокого и низкого давления. Поскольку звуковые волны состоят из сжатий и разрежений, их области колеблются между моделями низкого и высокого давления.По этой причине звуковые волны считаются волнами давления. Например, когда человеческое ухо принимает звуковые волны из окружающей среды, оно определяет разрежения как периоды низкого давления и сжатия как периоды высокого давления.
Поперечные волны
Поперечные волны движутся с колебаниями, перпендикулярными направлению волны. Звуковые волны не являются поперечными волнами, потому что их колебания параллельны направлению переноса энергии; однако звуковые волны могут стать поперечными при очень определенных обстоятельствах.Поперечные волны или поперечные волны распространяются с меньшей скоростью, чем продольные волны, а поперечные звуковые волны могут быть созданы только в твердых телах. Океанские волны — самый распространенный пример поперечных волн в природе. Более осязаемый пример может быть продемонстрирован, покачивая одну сторону струны вверх и вниз, в то время как другой конец закреплен (см. Видео о стоячих волнах ниже). Все еще немного запутались? Посмотрите визуальное сравнение поперечных и продольных волн ниже.
Визуальное сравнение продольных и поперечных волн.Как создать стоячие волны
С помощью струнного вибратора, генератора синусоидальной волны и стробоскопической системы PASCO учащиеся могут создавать, манипулировать и измерять стоячие волны в реальном времени. Генератор синусоидальной волны и струнный вибратор работают вместе, чтобы распространять синусоидальную волну по веревке, в то время как систему стробоскопа можно использовать для «замораживания» волн во времени. Создавайте четко определенные узлы, освещайте стоячие волны и исследуйте квантовую природу волн в режиме реального времени с помощью этого современного исследовательского подхода.Вы можете ознакомиться с некоторыми из наших любимых волновых приложений в видео ниже.
4 Свойства звука
Что отличает музыку от шума? Птичий крик более мелодичен, чем автосигнализация. И, как правило, мы можем отличить сирену скорой помощи от полицейской сирены, но как это сделать? Мы используем четыре свойства звука: высоту, динамику (громкость или мягкость), тембр (цвет тона) и продолжительность.
Частота (высота)
Pitch — это качество, которое позволяет нам оценивать звуки как «выше» и «ниже».Он предоставляет метод организации звуков на основе частотной шкалы. Высота звука может быть интерпретирована как музыкальный термин для обозначения частоты, хотя это не совсем то же самое. Высокий звук заставляет молекулы быстро колебаться, а низкий звук вызывает более медленные колебания. Высота звука может быть определена только в том случае, если частота звука достаточно четкая и постоянная, чтобы отличить ее от шума. Поскольку высота тона в первую очередь основана на восприятии слушателя, это не объективное физическое свойство звука.
Амплитуда (динамика)
Амплитуда звуковой волны определяет ее относительную громкость. В музыке громкость ноты называется ее динамическим уровнем. В физике мы измеряем амплитуду звуковых волн в децибелах (дБ), которые не соответствуют динамическим уровням. Более высокие амплитуды соответствуют более громким звукам, а более короткие амплитуды соответствуют более тихим звукам. Несмотря на это, исследования показали, что люди воспринимают звуки на очень низких и очень высоких частотах как более мягкие, чем звуки на средних частотах, даже если они имеют одинаковую амплитуду.
Тембр (цвет тона)
Тембр относится к цвету тона или «ощущению» звука. Звуки с разным тембром создают разные формы волн, которые влияют на нашу интерпретацию звука. Звук пианино отличается по цвету от звука гитары. В физике мы называем это тембром звука. Это то, что позволяет людям быстро распознавать звуки (например, кошачье мяуканье, проточная вода, звук голоса друга).
Продолжительность (темп / ритм)
В музыке продолжительность — это количество времени, в течение которого длится тон или тон.Их можно охарактеризовать как длинные, короткие или требующие некоторого времени. Продолжительность ноты или тона влияет на тембр и ритм звука. Классическая фортепианная пьеса будет иметь ноты большей продолжительности, чем ноты, сыгранные клавишником на поп-концерте. В физике продолжительность звука или тона начинается после того, как звук регистрируется, и заканчивается, когда он не может быть обнаружен.
Создание музыки с 4 свойствами звука
Музыканты манипулируют четырьмя свойствами звука, создавая повторяющиеся паттерны, образующие песню.Продолжительность — это время, в течение которого длится музыкальный звук. Когда вы играете на гитаре, звук прекращается, когда вы успокаиваете струны. Высота звука — это относительная высота или слабость звука, которая определяется частотой звуковых колебаний. Более быстрые колебания производят более высокую высоту звука, чем более медленные. Более толстые струны гитары производят более медленные вибрации, создавая более глубокую высоту звука, в то время как более тонкие струны производят более быстрые вибрации и более высокую высоту звука. Звук с определенной высотой или определенной частотой называется тоном.Тоны имеют определенные частоты, которые достигают уха через равные промежутки времени, например 320 циклов в секунду. Когда два тона имеют разные высоты, они звучат по-разному, и разница между их высотой звука называется интервалом. Музыканты часто используют интервал, называемый октавой, который позволяет двум тонам разной высоты звучать одинаково. Динамика относится к степени громкости или мягкости звука и связана с амплитудой вибрации, производящей звук. Чем сильнее натянута гитарная струна, тем громче будет звук.Цвет тона или тембр описывает общее ощущение звука, производимого инструментом. Если бы мы описали цвет тона трубы, мы могли бы назвать его ярким или блестящим. Когда мы рассматриваем виолончель, мы можем сказать, что она имеет насыщенный цветовой тон. Каждый инструмент предлагает свой собственный цвет тона, и можно создавать новые цвета тона, совмещая инструменты друг с другом. Кроме того, современные музыкальные стили, такие как EDM, представили новые стили тона, которые были недоступны до создания цифровой музыки.
Что делает звук музыкой или шумом?
Акустики, или ученые, изучающие акустику звука, изучали, как различные типы звуков, в первую очередь шум и музыка, влияют на людей.Рандомизированные неприятные звуковые волны часто называют шумом. Кроме того, построенные модели звуковых волн известны как музыка. Исследования показали, что человеческое тело по-разному реагирует на шум и музыку, что может объяснить, почему строительство дороги субботним утром делает нас более напряженными, чем песня пианиста.
Акустика
Акустика — это междисциплинарная наука, изучающая механические волны, включая вибрацию, звук, инфразвук и ультразвук в различных средах, таких как твердые тела, жидкости и газы.Профессионалы в области акустики могут варьироваться от инженеров-акустиков, которые исследуют новые области применения звука в технологиях, до инженеров-звукорежиссеров, специализирующихся на записи и управлении звуком, до акустиков, которые являются учеными, занимающимися наукой о звуке.
Резонансная воздушная колонна
Независимо от того, нужен ли вам универсальный волновой демонстратор или доступное по цене устройство, которое позволяет студентам на практике экспериментировать с резонансом и гармониками, Resonance Air Column — ваш лучший инструмент.Резонансная воздушная колонна состоит из полой трубки с поршнем внутри. Когда поршень перемещается через резонансную воздушную колонну, каждый раз, когда он сталкивается с узлом, издается громкий звуковой сигнал. Используя измерители и кольца для крепления на ремне, учащиеся могут определять, измерять и отмечать расположение узлов и пучностей в резонансной воздушной колонне — и все это при просмотре данных в реальном времени с помощью дисплея БПФ Capstone. После изучения резонансной частоты, узлов и пучностей учащиеся могут сравнить свои экспериментальные измерения с ожидаемыми измерениями, используя свои собственные графики и расчеты.
Характеристики звуковых волн
Есть пять основных характеристик звуковых волн: длина волны, амплитуда, частота, период времени и скорость. Длина звуковой волны указывает расстояние, которое проходит волна, прежде чем она повторится. Сама длина волны представляет собой продольную волну, которая показывает сжатие и разрежение звуковой волны. Амплитуда волны определяет максимальное смещение частиц, возмущенных звуковой волной, когда она проходит через среду.Большая амплитуда указывает на большую звуковую волну. Частота звуковой волны указывает количество звуковых волн, производимых каждую секунду. Низкочастотные звуки производят звуковые волны реже, чем высокочастотные звуки. Временной период звуковой волны — это количество времени, необходимое для создания полного волнового цикла. Каждая вибрация от источника звука производит звук величиной с волну. Каждый полный волновой цикл начинается с впадины и заканчивается в начале следующей впадины. Наконец, скорость звуковой волны показывает, насколько быстро волна движется, и выражается в метрах в секунду.
Схема звуковой волны. Между двумя впадинами возникает волновой цикл.Единицы звука
Когда мы измеряем звук, нам доступны четыре различных единицы измерения. Первая единица называется децибелом (дБ). Децибел — это логарифмическое отношение звукового давления к эталонному давлению. Следующей наиболее часто используемой единицей измерения является герц (Гц). Герцы — это мера звуковой частоты. Герцы и децибелы широко используются для описания и измерения звуков, но также используются фон и звуковой сигнал.Сон — это воспринимаемая громкость звука, а фон — это единица громкости для чистых тонов. Кроме того, фон относится к субъективной громкости, а звук — к воспринимаемой громкости.
Объяснение графиков звуковых волн
Звуковые волны можно описать с помощью графика смещения или плотности. Графики смещения-времени показывают, насколько далеко частицы находятся от своих первоначальных мест, и показывают, в каком направлении они двигались. Частицы, которые появляются на нулевой линии на графике смещения частиц, вообще не двигались из своего нормального положения.Эти, казалось бы, неподвижные частицы испытывают большее сжатие и разрежение, чем другие частицы. Поскольку давление и плотность взаимосвязаны, график зависимости давления от времени будет отображать ту же информацию, что и график зависимости плотности от времени. Эти графики показывают, где частицы сжаты, а где сильно расширены. В отличие от графиков смещения, частицы вдоль нулевой линии на графике плотности никогда не сжимаются и не растягиваются. Напротив, это частицы, которые больше всего движутся вперед и назад.
Звуковое давление
Звуковое давление описывает отклонение местного давления от атмосферного давления окружающей среды при распространении звуковой волны. Важно понимать, что звуковое давление и давление воздуха — разные понятия. В целом, на скорость звука не влияет давление воздуха. Когда звуковые волны проходят от источника звука через воздух, они изменяют давление, испытываемое соседними частицами воздуха.
Уровень звука
Уровень звука — это сравнение давления звуковой волны относительно контрольной точки.Уровень звука измеряется в децибелах, причем более высокие децибелы соответствуют более высоким уровням звука. Некоторые звуковые инструменты измеряют уровень звука в дБн, который представляет собой отношение мощности (децибел) сигнала к его несущему сигналу. Другие звуковые инструменты измеряют относительную громкость звуков, воспринимаемых человеческим ухом, с помощью децибел, взвешенных по шкале А, известной как дБа. Когда используется дБа, звуки на низких частотах уменьшаются в децибелах по сравнению с невзвешенными децибелами.
Уровень звука — это сравнение давления звуковой волны относительно контрольной точки.Измеритель дБн измеряет высокие и низкие частоты, а измеритель дБа измеряет частоты среднего уровня.
Интенсивность звука
Интенсивность звука — это мощность звуковой волны на единицу площади. Чем интенсивнее звук, тем больше будут колебания амплитуды. По мере увеличения интенсивности звука давление, оказываемое звуковыми волнами на близлежащие объекты, также увеличивается. Децибелы используются для измерения отношения заданной интенсивности (I) к порогу интенсивности слышимости, которая обычно имеет значение 1000 Гц для человеческого уха.
Интенсивность звука — это мощность звуковой волны на единицу площади. Чем интенсивнее звук, тем больше будут колебания амплитуды. По мере увеличения интенсивности звука давление, оказываемое звуковыми волнами на близлежащие объекты, также увеличивается.Интенсивность звука в воздушном столбе
Воздушный столб — это большая полая труба, открытая с одной стороны и закрытая с другой. Условия, создаваемые воздушным столбом, особенно полезны для исследования звуковых характеристик, таких как интенсивность и резонанс.Посмотрите видео ниже, чтобы увидеть, как воздушные колонны можно использовать для исследования узлов, пучностей узлов и резонанса.
Экспериментальное исследование распределения стабильных изотопов воды в среде альпийского озера (L-WAIVE)
Бартлотт, К., Корсмайер, У., Мейснер, К., Браун, Ф., и Коттмайер, К.: Влияние мезомасштабных циркуляционных систем на запуск конвективной ячейки на сложной местности, Атмос. Res., 81, 150–175, https://doi.org/10.1016/j.atmosres.2005.11.010, 2006.
Берендт, А.: Измерения температуры с помощью лидара, в: Лидар. Springer Series in Optical Sciences, под редакцией: Weitkamp, C., Springer, New York, NY, USA, 102, 273–305, https://doi.org/10.1007/0-387-25101-4_10, 2006.
Беркельхаммер, М., Ноун, округ Колумбия, Вонг, Т. Э., Бернс, С. П., Ноулз, Дж. Ф., Кошик А., Бланкен П. Д. и Уильямс М. В .: Конвергентные подходы к определить транспирационную фракцию экосистемы, Global Biogeochem. Cy., 30, 933–951, https://doi.org/10.1002/2016GB005392, 2016.
Бертье, С., Chazette, P., Couvert, P., Pelon, J., Dulac, F., Thieuleux, F., Moulin, C., and Pain, T. -Space Technology Experiment (LITE) и синергия Meteosat, J. Geophys. Res., 111, D21202, https://doi.org/10.1029/2005JD006999, 2006.
Chazette, P. and Totems, J .: Mini N2-Raman Lidar бортовой сверхлегкий самолет для измерения аэрозолей: демонстрация и экстраполяция, дистанционное Sens., 9, 1226, https://doi.org/10.3390 / rs9121226, 2017.
Chazette, P., Couvert, P., Randriamiarisoa, H., Sanak, J., Bonsang, B., Мораль, П., Бертье, С.С., Саланаве, С., и Туссен, Ф .: Трехмерный обзор загрязнения зимой в долинах французских Альп, Атмос. Environ., 39, 1035–1047, https://doi.org/10.1016/j.atmosenv.2004.10.014, 2005.
Шазетт П., Санак Дж. И Дулак Ф .: Новый подход к профилированию аэрозолей. с лидаром на борту сверхлегкого самолета: приложение к африканскому Междисциплинарный анализ муссонов, Environ.Sci. Технол., 41, 8335–8341, https://doi.org/10.1021/es070343y, 2007.
Chazette, P., Dabas, A., Sanak, J., Lardier, M., and Royer, P. для исследования шлейфа пепла Эйяфьятлайокудль, Atmos. Chem. Phys., 12, 7059–7072, https://doi.org/10.5194/acp-12-7059-2012, 2012.
Chazette, P., Marnas, F., and Totems, J .: Мобильная вода. паровой аэрозольный раман-лидар и его значение в рамках программ HyMeX и ChArMEx: приложение к процессу переноса пыли, Atmos.Измер. Tech., 7, 1629–1647, https://doi.org/10.5194/amt-7-1629-2014, 2014.
Chazette, P., Totems, J., and Shang, X .: изменчивость атмосферного аэрозоля. над районом Парижа во время аномальной жары 2015 г. — Сравнение с периодом 2003 г. и волны тепла 2006 г., Атмос. Environ., 170, 216–233, https://doi.org/10.1016/j.atmosenv.2017.09.055, 2017.
Шазетт, П., Тотемс, Дж., Барон, А., Фламант, К., и Бони, С.: Trade- ветровые облака и аэрозоли, полученные с помощью горизонтальных лидарных измерений в воздухе во время полевой кампании EUREC 4 A, Earth Syst.Sci. Data, 12, 2919–2936, https://doi.org/10.5194/essd-12-2919-2020, 2020.
Крейг, Х. и Гордон, Л. И .: Вариации дейтерия и кислорода в океане и морская атмосфера, в: Стабильные изотопы в океанографических исследованиях и Палеотемпературы, отредактированный: Тонгиорги, Э., Laboratorio di Geologia Nucleare, Пиза, Италия, 1965.
Куй, Б. Л., Ли, X. Y. и Вей, X. Х .: Изотоп и гидрохимия. эволюционные процессы озерной воды в озере Цинхай, J. Great Lakes Res., 42, 580–587, https://doi.org/10.1016/j.jglr.2016.02.007, 2016.
Канлифф М., Энгель А., Фрка С., Гашпарович Б. Э., Guitart, К., Мюррелл, Дж. К., Солтер, М., Штолле, К., Апстилл-Годдард, Р., и Вурл, О .: Микрослои поверхности моря: единый физико-химический и биологический перспектива границы раздела воздух-океан, Прог. Океаногр., 109, 104–116, https://doi.org/10.1016/j.pocean.2012.08.004, 2013.
Danis, P.-A .: Modélisation du fonctionnement thermique, Hydrologique et al. isotopique de systèmes lacustres: чувствительность к изменениям climatiques et amélioration des reconstructions paléoclimatiques, HAL Id: tel-00360067, версия 1, доступно по адресу: https: // тел.archives-ouvertes.fr/tel-00360067 (последний доступ: 5 ноября 2020 г.), 2009 г.
Дэнис, П. А., Фон Графенштейн, У., и Массон-Дельмотт, В .: Чувствительность температура глубокого озера в связи с прошлыми и будущими климатическими изменениями: модельное исследование для озера Анси, Франция, и Аммерзее, Германия, J. Geophys. Res.-Atmos., 108, 4609, https://doi.org/10.1029/2003jd003595, 2003.
Dansgaard, W .: Стабильные изотопы в осадках, Tellus, 16, 436–468, https://doi.org/10.3402/tellusa.v16i4.8993, 1964.
Демоз, Б.Б., Коллетт, Дж. Л. и Даубе, Б.К .: О сборщиках облачной воды с активной цепью в калтехе, Atmos. Res., 41, 47–62, https://doi.org/10.1016/0169-8095(95)00044-5, 1996.
Drobinski, P., Steinacker, R., Richner, H., Baumann- Станцер, К., Беффри, Г., Бенек, Б., Бергер, Х., Чимани, Б., Дабас, А., Дорнингер, М., Дюрр, Б., Фламант, К., Фриуд, М., Фургер, М., Грён, И., Губсер, С., Гутерманн, Т., Хэберли, К., Хеллер-Шарнхост, Э., Яуберт, Г., Лотон М., Митев В., Печингер У., Пирингер М., Ратейзер, М., Руффье, D., Seiz, G., Spatzierer, M., Tschannett, S., Vogt, S., Werner, R., and Zängl, G .: Föhn в долине Рейна во время MAP: обзор его многомасштабная динамика в сложной геометрии долины, Q.J.R. Meteorol. Soc., 133, 897–916, https://doi.org/10.1002/qj.70, 2007.
Даттон, А., Уилкинсон, Б. Х., Велкер, Дж. М., Боуэн, Г. Дж., И Ломанн, К. C .: Пространственное распределение и сезонные колебания в 18O / 16O современных осадков и речной воды на территории США, Hydrol.Process., 19, 4121–4146, https://doi.org/10.1002/hyp.5876, 2005.
Flamant, C., Drobinski, P., Nance, L., Banta, R., Darby, L ., Дусек, Дж., Хардести М., Пелон Дж. И Ричард Э.: Разрыв потока в альпийской долине во время мелководное явление на юге фен: наблюдения, численные моделирование и гидравлический аналог, Q.J.R. Meteorol. Соц., 128, 1173–1210, https://doi.org/10.1256/0035
320373256, 2002.
Гат, Дж. Р .: Изотопы кислорода и водорода в гидрологическом цикле, Annu. Ред. Планета Земля.Sci., 24, 225–262, https://doi.org/10.1146/annurev.earth.24.1.225, 1996.
Гат, Дж. Р .: Атмосферный водный баланс — изотопная перспектива. Hydrol. Процесс., 14, 1357–1369, 2000.
Гат, Дж. Р .: Изотопная гидрология — исследование круговорота воды, под редакцией: Вей, Т. К., Imperial College Press, World Scientific Publishing Co., Сингапур, 2010.
Гат, Дж. Р., Баузер, К. Дж. И Кендалл, К.: Вклад испарения от Великих озер до континентальной атмосферы: оценка на основе стабильных изотопные данные, Geophys.Res. Lett., 21, 557–560, https://doi.org/10.1029/94GL00069, 1994.
Гибсон, Дж. Дж. И Эдвардс, Т. В. Д .: Региональные тенденции водного баланса и испарение-транспирация из исследования стабильных изотопов озер в северной Канаде — Global Biogeochem. Cy., 16, 10-1–10-14, https://doi.org/10.1029/2001gb001839, 2002.
Граф, П., Вернли, Х., Пфаль, С., и Содеманн, Х .: Новая интерпретационная структура для воздействия под облаками на стабильные изотопы воды в паре и дожде, Атмос.Chem. Phys., 19, 747–765, https://doi.org/10.5194/acp-19-747-2019, 2019.
Гриффис, Т.Дж., Вуд, Д.Д., Бейкер, Д.М., Ли, X., Сяо, К., Чен, З., Велп, Л.Р., Шульц, Н.М., Горски, Г., Чен, М., и Нибер, Дж .: Исследование источника, переноса и изотопного состава водяного пара в пограничном слое планеты. Атмос. Chem. Phys., 16, 5139–5157, https://doi.org/10.5194/acp-16-5139-2016, 2016.
Gupta, HV, Kling, H., Yilmaz, KK, and Martinez, GF: Decomposition среднеквадратичной ошибки и критериев эффективности NSE: последствия для улучшения гидрологического моделирования, J.Hydrol., 377, 80–91, https://doi.org/10.1016/j.jhydrol.2009.08.003, 2009.
He, H. и Smith, R.B .: Стабильный изотопный состав водяного пара в атмосферный пограничный слой над лесами Новой Англии, J. Geophys. Res.-Atmos., 104, 11657–11673, https://doi.org/10.1029/1999JD
0, 1999.Herrmann, H .: Кинетика водно-фазовых реакций, имеющих отношение к атмосфере. Химия, Хим. Rev., 103, 4691–4716, https://doi.org/10.1021/cr020658q, 2003.
Hersbach, H., Белл, Б., Беррисфорд, П., Биавати, Г., Хораньи, А., Муньос Сабатер, Дж., Николас, Дж., Пьюби, К., Раду, Р., Розум, И., Шеперс, Д. ., Симмонс, А., Соци, К., Ди, Д., и Тепо, Ж.-Н .: ежечасные данные ERA5 об уровнях давления с 1979 г. по настоящее время, хранилище климатических данных (CDS) Службы изменения климата Copernicus (C3S). [набор данных], https://doi.org/10.24381/cds.bd0915c6, 2018.
МАГАТЭ: Справочный лист по международным эталонам VSMOW2 и SLAP2, Международное агентство по атомной энергии, Вена, Австрия, 5 стр., доступно по адресу: https://nucleus.iaea.org/sites/ReferenceMaterials/Shared Documents / ReferenceMaterials / StableIsotopes / VSMOW2 / VSMOW2_SLAP2.pdf (последний доступ: 8 июля 2021 г.), 2009 г.
Ясечко, С., Шарп, З.Д., Гибсон, Дж. Дж., Биркс, С.Дж., Йи, Й. и Фосетт, П. Дж .: В наземных водных потоках преобладает транспирация, Природа, 496, 347–350, https://doi.org/10.1038/nature11983, 2013.
Кендалл К. и Коплен Т. Б. Распределение кислорода-18 и дейтерия в речные воды через Соединенные Штаты, Hydrol.Процесс., 15, 1363–1393, https://doi.org/10.1002/hyp.217, 2001.
Koscielny, A.J., Doviak, R.J., Zrnic, D.S .: Оценка Точность некоторых методов радиолокационного профилирования ветра, J. Atmos. Океан. Technol., 1, 309–320, https://doi.org/10.1175/1520-0426(1984)001<0309:AEOTAO>2.0.CO;2, 1984.
Kottmeier, C., Kalthoff, N., Barthlott, К., Корсмайер, У., Ван Баелен, Дж., Берендт, А., Берендт, Р., Блит, А., Колтер, Р., Круэлл, С., Ди Джироламо П., Дорнингер М., Фламант, К., Фокен, Т., Хаген, М., Хаук, К., Хёллер, Х., Конов, Х., Кунц, М., Мальке, Х., Моббс, С., Ричард, Э., Steinacker, R., Weckwerth, T., Wieser, A., and Wulfmeyer, V .: Механизмы инициирование глубокой конвекции на сложной местности во время COPS, Meteorol. Z., 17, 931–948, https://doi.org/10.1127/0941-2948/2008/0348, 2008.
Lesouëf, D., Gheusi, F., Chazette, P., Delmas, R. , и Санак, Дж .: Низкий Слои тропосферы над островом Реюньон по данным лидарных наблюдений и Модель высокого разрешения, привязанная.-Класть. Метеорология, 149, 425–453, https://doi.org/10.1007/s10546-013-9851-9, 2013.
Majoube, M .: Fractionnement en oxygène 18 et en deutérium entre l’eau et sa vapeur, J. Chim. Phys., 68, 1423–1436, https://doi.org/10.1051/jcp/1971681423, 1971.
Майр, Г. Дж., Арми, Л., Гом, А., Зенгл, Г., Дурран, Д. Р., Фламант, К., Габершек, С., Моббс, С., Росс, А., и Вайсманн, М .: Разрывные потоки: результаты из мезомасштабной альпийской программы, Q.J.R. Meteorol. Соц., 133, 881–896, https: // doi.org / 10.1002 / qj.66, 2007.
Noone, D .: Сопряжение измерений изотопного отношения водяного пара с влажность, чтобы вывести атмосферное увлажнение и обезвоживание в тропиках midtroposphere, J. Climate, 25, 4476–4494, https://doi.org/10.1175/JCLI-D-11-00582.1, 2012.
Platt, CMR: Lidar Observation of the Mixed-Phase Altostratus Cloud, J. Прил. Meteorol., 16, 339–345, https://doi.org/10.1175/1520-0450(1977)016<0339:looamp>2.0.co;2, 1977.
Raut, J.-C. и Шазетт П.: Оценка PM 10 с вертикальным разрешением по данным мобильных лидарных наблюдений, Atmos. Chem. Phys., 9, 8617–8638, https://doi.org/10.5194/acp-9-8617-2009, 2009.
Salmon, OE, Welp, LR, Baldwin, ME, Hajny, KD, Stirm, BH , и Шепсон, ПБ: Наблюдения за вертикальным профилем избытка дейтерия водяного пара в нижней тропосфере, Atmos. Chem. Phys., 19, 11525–11543, https://doi.org/10.5194/acp-19-11525-2019, 2019.
Sodemann, H., Aemisegger, F., Pfahl, S., Биттер, М., Корсмайер, У., Фейерле, Т., Граф, П., Ханкерс, Р., Сяо, Г., Шульц, Х., Визер, А., Вернли, Х .: Стабильный изотоп состав водяного пара над Корсикой во время кампании HyMeX SOP1: понимание процессов вертикального перемешивания из исследовательских полетов в нижних слоях тропосферы, Atmos. Chem. Phys., 17, 6125–6151, https://doi.org/10.5194/acp-17-6125-2017, 2017.
Steen-Larsen, HC, Johnsen, SJ, Masson-Delmotte, V., Stenni, Б., Ризи, К., Содеманн, Х., Бальслев-Клаузен, Д., Блюнье, Т., Dahl-Jensen, D., Ellehøj, MD, Falourd, S., Grindsted, A., Gkinis, V., Jouzel, J., Popp, T., Sheldon, S., Simonsen, SB, Sjolte, J. , Steffensen, JP, Sperlich, P., Sveinbjörnsdóttir, AE, Vinther, BM, and White, JWC: Непрерывный мониторинг изотопного состава летнего поверхностного водяного пара над ледниковым щитом Гренландии, Atmos. Chem. Phys., 13, 4815–4828, https://doi.org/10.5194/acp-13-4815-2013, 2013.
Стин-Ларсен, Х. К., Свейнбьернсдоттир, А. Э., Петерс, А. Дж., Массон-Дельмотт, В., Guishard, MP, Hsiao, G., Jouzel, J., Noone, D., Warren, JK, and White, JWC: Климатический контроль избытка дейтерия водяного пара в морском пограничном слое Северной Атлантики на основе 500 дней на месте, непрерывные измерения, Атмос. Chem. Phys., 14, 7741–7756, https://doi.org/10.5194/acp-14-7741-2014, 2014.
Totems, J., Chazette, P., and Raut, J .: Accuracy of current Арктическая весна оценки водяного пара, полученные с помощью рамановского лидара, Q.J.R. Meteorol. Soc., 145, 1234–1249, https: // doi.org / 10.1002 / qj.3492, 2019.
Weng, Y., Touzeau, A., and Sodemann, H .: Корректировка влияния изотопного состава на зависимость отношения смеси при измерениях изотопов водяного пара с полостью вниз. спектрометры, Атмос. Измер. Tech., 13, 3167–3190, https://doi.org/10.5194/amt-13-3167-2020, 2020.
Worden, J., Noone, D., Bowman, K., Beer, R. , Элдеринг, А., Фишер, Б., Гансон, М., Гольдман, А., Герман, Р., Кулавик, С.С., Лампель, М., Остерман, Г., Ринсленд, К., Роджерс, К., Сандер, С., Шепард, М., Вебстер, К. Р., и Уорден, Х .: Важность дождевого испарения и континентальной конвекции в тропический водный цикл, Природа, 445, 528–532, https://doi.org/10.1038/nature05508, 2007.
295467_nr1_omslag_Niklas.indd
% PDF-1.6 % 1 0 объект > >> эндобдж 8 0 объект > эндобдж 2 0 obj > / Шрифт> >> / Поля [] >> эндобдж 3 0 obj > ручей 2020-04-24T14: 37: 48 + 02: 002020-04-27T13: 21: 53 + 02: 002020-04-27T13: 21: 53 + 02: 00Adobe InDesign 15.0 (Windows) uuid: 01c9628b-f5c9-48e5-b331-117b60d6c725xmp.did: E7BA5A33B3E7E611B50FEA87FE55DEAAxmp.id: 0e70849e-b2da-8749-a119-77918225b2d2d2d2d2d2d2e0cddddddddddddddddddddddddddddddddddddddddddddddddddddddddddddd2 6c37-2b4e-80c6-542ba00234bcxmp.did: E7BA5A33B3E7E611B50FEA87FE55DEAA по умолчанию
тип приемника, используемый в РЛС
Основным типом РЛС является первичный РЛС. Этот был выполнен в тропическом исполнении в 1946 году и оснащен радиочастотным блоком 26B 10DB / 8653. (Каждая мачта была высотой 350 футов). Это позволяло обнаруживать низколетящие самолеты и прибрежные суда, но не малые суда или низколетящие… Современные радары используют даже миллиметровые диапазоны. Следовательно, радар не может принимать сигнал во время… Sec / Ref: 10D / 16876 Battlefield, Missile Control, and Ground Surveillance Radar.RAW ВИДЕО. После таблицы-1 упоминаются общие радиолокационные диапазоны и пиковая мощность, передаваемая в каждом из этих диапазонов. Мы можем разделить радары MTI на следующие два типа в зависимости от типа используемого передатчика. Описание геодара (обнаружение и дальность эхосигнала от земли), типа георадара, разработанного в лаборатории Линкольна Массачусетского технологического института в середине 1960-х годов для обнаружения туннелей во время войны во Вьетнаме. AN / FPS-126, часть разницы в задержке и доплеровском сдвиге между ними, а также угол к цели, а также скорость их изменения могут полностью или частично использоваться для целей самонаведения.Ракетный приемник получает два приема одной и той же радиолокационной передачи: один через путь радар-ракета и один через путь радар-цель-ракета. Он состоит из серии этапов обработки сигнала для обнаружения цели. прямая ВЧ-выборка возможна с использованием ADC32RF45, 3-Gsps, 14-битный, двухканальный аналого-цифровой. волновая часть спектра, охватывающая широкий диапазон от 10 4 км до 1 см. Дуплексер — это микроволновый переключатель, который соединяет антенну с секцией передатчика для передачи сигнала.• Сверхрегенеративный ресивер. Радарное измерение уровня является безопасным решением даже в экстремальных условиях процесса (давление, температура) и испарения. радар (радиообнаружение и дальность): Радар — это аббревиатура от «радиообнаружения и дальности». Они не требуют транспортировки какой-либо среды. Он также должен усиливать слабые принимаемые сигналы до уровня, при котором выходной сигнал приемника достаточно велик, чтобы активировать дисплей или компьютер. Радарные уровнемеры также могут использоваться в гигиенических целях для бесконтактного измерения уровня.Приемник. 8. Радар непрерывного действия (CW) 9. В системе ARI 5122 использовались приемник R3136, передатчик T3135 и индикатор типа 116. Секции передачи высокой мощности (100 Вт… • Подключите приемник к антенне (и отключите передатчик) во время приема. Автомобильный радар обычно работает на частоте 77 ГГц и подпадает под три категории — ближний диапазон радар (SRR) — от 0,5 до 20 метров Радар — это аббревиатура от Radio Detection and Ranging. Голосовые оповещения: помимо обычных считываний и звуковых сигналов, большинство радаров… По сути, эти устройства просто действуют как радиоприемники, улавливая точные частоты используются радиолокационными устройствами, специальными радиолокационными установками, используемыми полицией для обнаружения и обнаружения превышающих скорость машин.Поскольку цели на экране радара движутся быстрее на меньшем расстоянии, PROC 1 используется на расстоянии 1,5 мили или меньше. Лучшие радары общего назначения различают дождь, сильный шторм, а также сушу и автомобили. Бистатическая радиолокационная система: бистатическая радиолокационная система использует независимые антенны для передачи и приема сигнала. Блок обработки — использует захваченные сигналы и их свойства для получения информации об обнаружении, дальности и другой полезной информации. Радарное обнаружение всех диапазонов: хороший радиодетектор должен уметь обнаруживать основные типы диапазонов, используемых в U.S — диапазоны X, K и Ka. Приложения. Радиолокационные сигналы могут одновременно нацеливаться на несколько объектов. Аналогично PROC 2 используется для диапазонов 1,5 и 3 Нм. • Передатчик и приемник радара можно разделить на две важные подсистемы — секции передатчика высокой мощности — секции малой мощности Генератор сигналов радара и приемник Дуплексер Генератор сигналов приемник Усилитель высокой мощности Фильтр Низкий уровень шума Раннее использование радара в навигации. Они обычно используют частоты навигационных радаров, но модулируют импульс, чтобы приемник мог определить тип поверхности отражателя.Доплеровский радар. Затем передатчику позволяют отдохнуть до следующего импульса (как показано на рис. 3-2), а приемник тем временем прослушивает эхо. Радар MTI с передатчиком-усилителем мощности; Радар MTI с передатчиком-генератором мощности 1 Аргентина 2 Австралия 2.1 Наземный 2.2 Военно-морской 3 Бразилия 3.1 Наземный 3.2 Воздушный 3.3 В стадии разработки 4 Европа 4.1 Наземный 4.2 Воздушный 4.3 Коммерческий / научный 5 • Генератор. Необходимая мощность доводится до необходимой мощности с помощью следующего усилителя (амплитрон, клистрон или твердотельный усилитель).Необработанные видеодисплеи — это просто осциллографы, отображающие обнаруженный и усиленный обратный сигнал цели (и шум приемника). Обычно используются три основных типа радиолокационных дуплексеров. — Преимущества: простота и низкая стоимость — Недостатки: нестабильность усиления, плохая селективность, высокий уровень шума приемника. Разветвленные дуплексеры Типичный разветвленный дуплексер показан на рисунке… Точно так же частота принимаемого сигнала будет уменьшаться, если цель удаляется от радара. Эталонный дизайн TIDA-00814 показывает использование прямого радиочастотного (RF) отбора проб в радиолокационном приемнике.Радиосигналы передаются через передатчик системы RADAR. Радиоволны излучаются через антенну, прикрепленную к передатчику. Как только сигналы попадают на объект, они отражаются обратно в передатчик через антенны, а затем данные используются для расчета деталей объекта. Полицейские радары или детекторы скорости используют эффект Доплера для измерения скорости, с которой проезжает автомобиль или другое транспортное средство. Форма волны. ОБЩИЕ ВИДЫ РАДИОЛОКАЦИЙ. Этот набор покрывает 150-200kc / s в 3-х диапазонах.9. Простой радар-детектор распознает радарные устройства в зависимости от излучаемых им радиоволн. В этой системе передающий импульс вызывается с небольшой производительностью в генераторе сигналов. RADAR использует радиосигналы, которые могут перемещаться в воздухе или космосе. Тихий шум. Благодаря использованию фазированных антенных решеток радиолокационная система может планировать передачу и прием. Необработанные видеодисплеи требуют, чтобы оператор интерпретировал различные шумы цели и… Это применение радара хорошо известно в Соединенных Штатах из знакомых телевизионных сводок погоды. осадков, наблюдаемых радарами «когерентного радара», для передачи и приема используется один и тот же опорный гетеродин.Примерами первичных радаров являются радар, используемый для наземного радиолокатора, поисковый радар воздушного базирования, радар управления вооружением… Тип используемого радиолокационного датчика также меняется. Они называются CW Doppler, и… В детекторах радаров используется нечто, называемое супергетеродинным приемником для обнаружения… Есть два основных типа CW радаров. Доступны версии радарных уровнемеров для различных отраслей промышленности, например: • Радарный датчик с частотой 77 или 79 ГГц может быть адаптирован в реальном времени для обеспечения дальнего обнаружения до 200 м по дуге 10 °, например, для обнаружения других транспортных средств. , но его также можно использовать в «гетеродинной» системе.Страницы радара: Экспонаты музея сигналов. Усилитель мощности. Радар также можно использовать в воздухе, борьба в полете может быть даже более опасной, чем борьба на суше или на море, но с использованием радара самолеты могут использовать антенны для обнаружения других вражеских самолетов, они также могут иметь их в В современных аэропортах, чтобы помочь пилоту найти взлетно-посадочную полосу в воздухе, радар будет посылать… Это особый тип радара, который использует эффект Доплера для получения данных о скорости цели … Моноимпульсный радар.Патент США 3 831 173: Наземная радиолокационная система, автор Роберт Лернер, Массачусетский технологический институт, 20 августа 1974 г. Усилитель высокой мощности. Большинство радаров работают в диапазонах частот УВЧ и СВЧ. Радиолокационные диапазоны. Следовательно, даже если для контроля сигнальной линии используется направленный ответвитель, все же рекомендуется напрямую измерять входной сигнал приемника при подозрении на отказ приемника. • Передатчик и приемник радара можно разделить на две важные подсистемы — секции передатчика высокой мощности — секции малой мощности Генератор сигналов радара и дуплексер приемника.- Одна лампа используется для усилителя RF в источниках RX и TX. Волноводный радарный уровнемер: в этой волноводной радарной технологии используются управляемые радарные зонды. ОБЪЯВЛЕНИЕ. Тип приемника R3582A GEE Mk2 или GEE-H 10DB / 8373. Чтобы установить уровень обработанного видео, просто щелкните вкладку PROC в левом нижнем углу радара JRC. (Подобно рис. 1.4 в «Скольнике».) Они использовались в тяжелых бомбардировщиках, таких как AVRO Lancaster. Моностатическая радиолокационная система: моностатическая радиолокационная система использует одну антенну как для передачи, так и для приема.Как и большинство других приемников, приемник РЛС представляет собой классический супергетеродин. Фильтр. Радиоволны по своей природе являются электромагнитными (состоят из переменных электрических и магнитных полей), • Дизайн радиолокационной системы. Этот тест не нужно проводить в экранированном помещении, и он больше подходит для радиолокатора или лаборатории РЭБ, где требуются полезные сигналы â € Радиоволны (импульсные или непрерывные) от â € РЛС — Радар — Погодный радар Доплера: многие годы радар использовался для получения информации об интенсивности и величине дождя и других форм осадков.Этот тип радиолокационной системы включает в себя Tx-передатчик и Rx-приемник, которые разделены на расстояние … Доплеровский радар. в системах обычно используются длины волн порядка 10 см, соответствующие частотам. • Хрустальный видеоприемник. Приемник GEE Тип R3673. Обнаружение лазера: все хорошие детекторы радаров также должны уметь обнаруживать лазерные лучи на случай, если полиция использует LIDAR. Эти радары также • Типы приемников. Конструкция радиолокационной системы Глава 7 Радиолокационный приемник Глава 7: Радиолокационный приемник7 — 1Dr.Конструкция радарной системы Sheng-Chou Lin Типы приемников • Сверхрегенеративный приемник — одна лампа используется для ВЧ-усилителя в источниках RX и TX. — Преимущества: простота и низкая стоимость — Недостатки: нестабильность усиления, плохая селективность, высокий уровень шума приемника. В следующей таблице 2 упоминаются все диапазоны радара с их соответствующим частотным диапазоном. определить дальность, скорость, угол места и азимут. требуется для. Приемник радиолокационной системы.Доплеровский радар излучает радиоволну на автомобиль, которая, в свою очередь, измеряет ожидаемое изменение частоты отраженной волны. Специальные приемные решетки на 105-футовых мачтах с CRHF и приемником 1426. • Типы радарных бистатических радаров. Этот тип радаров используется в основном… Эти радары передают непрерывные волны (CW), а также импульсные. 00101111010. Это список радаров. Типы радаров MTI. Каждый обсуждается ниже. Назад: Используйте этот указатель, чтобы перейти к другой теме. Этот тип антенны может фокусировать излучение радара в пучки высокой энергии, которые можно направлять электронным способом в космосе без необходимости физического перемещения конструкции антенны.Радар — это электронная система, используемая для обнаружения, определения дальности (определения расстояния) и отображения различных типов целей. В приборах радиолокационного уровня используются радиоволны вместо звуковых волн, используемых в ультразвуковых приборах. Поиск в Google на ABK показывает, что это система IFF Mk II. Другая координата на чертеже помечена как антенна R3003. Боудси продолжил работу в авангарде расширения радиолокационной сети с помощью AMES Type 2 Chain Home Low на 200-футовой платформе на южной (№ 4 из 4) мачте передатчика.Термин «радио». Мы должны использовать PROC 3, когда радар установлен на дальность 3 морских миль или выше. Он охватывал тот же частотный диапазон, что и MkII, но был разработан с десятью предустановленными каналами для всего частотного диапазона, вместо того, чтобы иметь отдельный разъем во входных радиочастотных блоках. Этот приемник использовался с системой GEE MkIII. относится к использованию электромагнитных волн с длинами волн в так называемом радио. Он должен фильтровать полезные эхо-сигналы от помех и шума приемника, которые мешают обнаружению. Далее >> Ствольная коробка Loran R-9B-APN4: Ствольная коробка Lorenz E10L: Ствольная коробка Люфтваффе Тип EZ6: Ствольная коробка Люфтваффе Тип EZ6: Ствольная коробка сделана учеником Люфтваффе Стемпель типа EZ6.Радиосигналы, используемые RADAR, действуют в более широкой области и могут нацеливаться на более чем один объект и возвращать данные обо всех нацеленных объектах. Радары AMTI в основном используются в армии, флоте, военно-воздушных силах и USCG. Импульсный доплеровский радар: как и система MTI, импульсный доплеровский радар представляет собой тип импульсного радара, который использует доплеровский сдвиг частоты эхо-сигнала для устранения помех и обнаружения движущихся самолетов. Основное различие между радарным уровнемером и ультразвуковым уровнемером — это тип используемой волны.Радиолокационный процессор используется для компиляции и анализа данных радара, которые возвращаются на тарелку / антенну. Приемник, который обнаруживает и усиливает сигнал. Система отображения A — одна напрямую связана с радаром, а другая — для вещателей для отображения их зрителям. Доплеровский радар — это специальная форма радара, в которой используется… • Обеспечивает постоянную адекватную изоляцию между приемником и передатчиком. Приемник — используется для обнаружения и захвата сигналов. * IFF Mk II — ссылка сделана на контурный чертеж R3090 / ABK 1943 года, рис.Радар. AN / FPS-120, часть твердотельной радиолокационной системы с фазированной решеткой (заменены радары BMEWS) AN / FPS-123 (V3), часть SSPARS (модернизированная PAVE PAWS) AN / FPS-123 (V7), часть SSPARS (модифицированный PAVE PAWS в Clear AFS) Автоматический радар (UAR) AN / FPS-124, ближнего действия, доплеровский радар. При двусторонней связи, если предполагается использовать одну и ту же антенну для передачи и приема сигналов, нам потребуется дуплексер. Радар может отслеживать штормовые системы, потому что датчики с частотой 77 ГГц обеспечивают больший диапазон и более высокое разрешение.Радарная система обычно работает в ультравысокой (UHF) или микроволновой части радиочастотного (RF) спектра и используется для обнаружения положения и / или движения объектов. Продано — Требуется больше B между 15 и 500, как используется в высокопроизводительных радиолокационных приемниках, уровни боковых лепестков могут варьироваться от 35 дБ до 45 дБ, в зависимости, например, от доплеровского сдвига, компромисса потерь рассогласования и выбранного значения промежуточной частоты (IF ). Это датчик контактного или инвазивного типа, в котором датчики для рефлектометрии во временной области (TDR) погружены в сухую или сыпучую среду.Сегодня широко используются два типа радарных дисплеев. Основное внимание в этом проектном приложении уделяется РЛС, работающему в S-диапазоне (от 2 ГГц до 4 ГГц), где. Радарная система состоит из передатчика, генерирующего электромагнитные волны в области радио- или микроволнового излучения, передающей антенны, приемной антенны (часто одна и та же антенна используется для передачи и приема), а также приемника и процессора для определения свойств объекта (ов).