Коэффициент маневренности собственного капитала. Формула и пример расчета в Excel для ОАО “Газпром”
В статье мы рассмотрим коэффициент маневренности собственного капитала, который отражает финансовую устойчивость и независимость предприятия.
Коэффициент маневренности собственного капитала. Формула
Коэффициент маневренности собственного капитала (аналог: коэффициент маневренности) – показывает финансовую устойчивость и отражает долю собственных средств, используемых для финансирования деятельности предприятия. Данный показатель отражает долю собственных оборотных средств в структуре собственного капитала и рассчитывается как отношение собственных оборотных средств к размеру собственного капитала. Собственные оборотные средства представляют собой разницу между собственным капиталом и внеоборотными активам предприятия. Формула расчета коэффициента маневренности собственного капитала следующая:
Пройдите наш авторский курс по выбору акций на фондовом рынке → обучающий курс Пройдите наш авторский курс по выбору акций на фондовом рынке → обучающий курсЕсли предприятие имеет в балансе долгосрочные пассивы (долгосрочные обязательства), то формула оценки собственных оборотных средств модифицируется в следующий вид:
Еще одним вариантом расчета коэффициента маневренности является использования альтернативного варианта формулы оценки собственных оборотных средств, представляющего разницу между оборотными активами и краткосрочными обязательствами. Формула оценки коэффициента следующая:
Формула оценки коэффициента следующая:
Коэффициент маневренности капитала. Норматив
Чем выше показатель маневренности, тем выше финансовая устойчивости и платежеспособность предприятия. Но в тоже время, сверхвысокие значения коэффициента маневренности могут достигаться при резком увеличении долгосрочных обязательств (стр. 1400), что снижает финансовую независимость предприятия. В таблице ниже показана классификация предприятий по уровню коэффициента маневренности.
| Коэффициент маневренности капитала | Оценка финансового состояния |
| К<0.3 | Предприятие финансово зависимо, высокий риск неплатежеспособности |
| 0.3<K<0.6 | Оптимальные значения коэффициента предприятие финансово независимо |
| K>0.6 | Предприятие финансово зависимо, высокий риск неплатежеспособности перед кредиторами |
Для того чтобы определить оптимальный показатель маневренности капитала выбранного предприятия необходимо сопоставить его значения со средними показателями по отрасли, потому что для каждой отрасли могут быть свои оптимальные диапазоны коэффициента. Среднеотраслевой показатель рассчитываются как среднеарифметическое значение коэффициентов предприятий, занимающихся одним видом деятельности (объединенных по коду ОКВЭД). Как правило, на практике коэффициент маневренности оценивается в динамике, это позволяет оценить результативности стратегии и политики управления на предприятии собственными оборотными средствами.
Среднеотраслевой показатель рассчитываются как среднеарифметическое значение коэффициентов предприятий, занимающихся одним видом деятельности (объединенных по коду ОКВЭД). Как правило, на практике коэффициент маневренности оценивается в динамике, это позволяет оценить результативности стратегии и политики управления на предприятии собственными оборотными средствами.
Коэффициент маневренности собственного капитала. Пример расчета в Excel
Пройдите наш авторский курс по выбору акций на фондовом рынке → обучающий курсРассмотрим пример расчета коэффициента маневренности собственного капитала для предприятия ОАО «Газпром» в Excel. Для этого необходимо получить финансовую отчетность о деятельности предприятия за исследуемый период. Для этого можно воспользоваться сервисом (Investfunds.ru).
Финансовая отчетность ОАО Газпром с сайта Investfunds
Выбрав период рассмотрения два года, мы получаем бухгалтерский отчет компании, представленный ниже и экспортированный в Excel. Для того чтобы рассчитать коэффициент маневренности собственного капитала необходимо использовать строки 1100, 1300 и 1400. Формула расчета в Excel будет иметь следующий вид:
Для того чтобы рассчитать коэффициент маневренности собственного капитала необходимо использовать строки 1100, 1300 и 1400. Формула расчета в Excel будет иметь следующий вид:
Коэффициент маневренности собственного капитала =(C26+C31-C10)/C26
Пример расчет коэффициента маневренности собственного капитала предприятия в Excel
Коэффициент маневренности капитала для ОАО «Газпром» ниже нормативного , но в тоже время устойчив на протяжении всего рассматриваемого периода. Данный коэффициент ниже норматива, из-за высокого значения нераспределенной прибыли предприятия. Для более детального анализа предприятия следует использовать другие коэффициенты оценки финансовой устойчивости. Кроме этого необходимо учитывать какую роль занимает предприятие в национальной экономике. ОАО «Газпром» является одним лидеров по вкладу в ВВП страны и является стратегически важным предприятием, которые даже в случае кризисов будет получать финансирование и поддержку государства.
Пройдите наш авторский курс по выбору акций на фондовом рынке → обучающий курс Автор: к.
Коэффициент маневренности собственного капитала в Excel
Коэффициент маневренности собственного капитала отражает уровень ликвидности принадлежащих предприятию финансовых средств. Показывает долю собственного капитала, направленную на финансирование текущей деятельности. Показатель является одним из индикаторов финансовой устойчивости организации.
Коэффициент маневренности собственного капитала: нормативное значение
Напомним, что ликвидность финансовых ресурсов – это способность преобразовываться в иные активы. Показатель маневренности СК показывает, какая доля денежной массы (собственного капитала) вложена в оборотные средства как самую маневренную часть активов. То есть какая часть СК «пущена в дело», направлена на производственные затраты, товарно-материальные запасы и иные активы длительного срока ликвидности.
Коэффициент маневренности собственных средств находят по формуле:
Км(ск) = собственные оборотные средства / собственный капитал.
В свою очередь, собственные оборотные средства – это разница между СК и внеоборотными активами компании.
Формула по балансу коэффициента маневренности собственного капитала
Как с опорой на бухгалтерскую отчетность найти коэффициент маневренности собственного капитала? Формула по балансу:
Км(ск) = (стр. 1300 – стр.1100) / стр. 1300.
Если долгосрочные обязательства компании имеют положительное значение, то формула расчета показателя трансформируется в следующий вид:
Км(ск) = (стр. 1300 + стр. 1400 – стр.1100) / стр. 1300.
Альтернативный вариант оценки показателя КМСК:
Км(ск) = (стр. 1200 – стр.1500) / стр. 1300.
Рекомендуемое значение коэффициента – 0,5 и выше. Но конкретный показатель нужно сравнивать со среднеотраслевым, который рассчитывается как среднеарифметическое значение. В каждой отрасли может существовать свой оптимальный диапазон. Именно с этими цифрами имеет смысл сопоставлять найденный для предприятия коэффициент.
Уменьшение коэффициента в динамике отрицательное значение указывает на:
- неспособность компании самостоятельно обеспечивать формирование затрат и запасов;
- сокращение капитала для формирования внеоборотных и текущих активов.
Увеличение коэффициента выше нормы указывает на:
- возможность свободно маневрировать своими финансовыми ресурсами;
- рост гибкости в распоряжении собственным капиталом.
Чем выше коэффициент маневренности, тем выше платежеспособность организации. Но сверхвысокие значения показателя могут наблюдаться при увеличении долгосрочных обязательств, из-за чего финансовая независимость уменьшается.
Пример расчета показателя в Excel
На практике принято оценивать коэффициент в динамике. Только так можно проанализировать результативность политики управления собственными оборотными средствами.
Возьмем период для анализа – 2011-2015 гг. Выделим строки, которые будем использовать для расчета коэффициента маневренности СК:
Формула расчета в Excel будет выглядеть так:
Показатель для организации ниже нормативного. Но не намного. Причем просматривается тенденция сохранения стабильности на протяжении всех 5 лет. Для более детального анализа и принятия стратегических решений необходимо смотреть значение коэффициента у других компаний, работающих в той же отрасли, а также другие показатели оценки финансовой устойчивости.
Но не намного. Причем просматривается тенденция сохранения стабильности на протяжении всех 5 лет. Для более детального анализа и принятия стратегических решений необходимо смотреть значение коэффициента у других компаний, работающих в той же отрасли, а также другие показатели оценки финансовой устойчивости.
Покажем в динамике коэффициент на графике Excel:
Отметим незначительный рост показателя в последние два года. Что является положительным фактором. И может указывать на рост платежеспособности и финансовой независимости организации, способность поддерживать уровень собственного оборотного капитала, обеспечивать оборотные средства за счет собственных источников финансирования.
Коэффициент маневренности собственного капитала
Содержание страницы
Коэффициент маневренности капитала используется в рамках анализа финансовой устойчивости. Он нужен для определения зависимости предприятия от заемных денег. Также значение позволяет определить потенциальную платежеспособность.
Как проводить анализ финансовой устойчивости компании на основе моделей прогнозирования банкротства?
Что представляет собой коэффициент
Коэффициент маневренности – это значение эффективности деятельности компании.
Он определяет степень независимости фирмы от кредиторов. При этом учитываются оборотные средства. Высокий коэффициент обеспечивает большой объем оборотных средств.
Какие существуют способы пополнения оборотных средств?
Эти денежные средства – одно из условий активного развития фирмы. За их счет происходит расширение компании, модернизация ее составляющих. Для определения коэффициента нужно разделить оборотные средства на размер капитала. Этот показатель отображает данные аспекты:
- Какой процент средств компании имеется в обороте.
- Уровень финансовой независимости организации.
Независимость компании принципиальна для ее развития, предотвращения банкротства.
Формула для расчета
Коэффициенты маневренности рассчитываются по различным формулам. Информация для расчетов берется из бухгалтерского баланса компании. Данные, используемые при расчетах, должны быть максимально точными. Только в этом случае можно получить достоверный результат. Рассмотрим самую простую формулу для расчетов (строки берутся из бухгалтерского баланса):
Информация для расчетов берется из бухгалтерского баланса компании. Данные, используемые при расчетах, должны быть максимально точными. Только в этом случае можно получить достоверный результат. Рассмотрим самую простую формулу для расчетов (строки берутся из бухгалтерского баланса):
(Строка 1300 – строка 1100) / строка 1300
Строка 1300 – это размер собственного капитала организации. Первый этап расчетов (строка 1300 – строка 1100) помогает определить размер собственных оборотных средств. Эта формула используется в стандартных условиях.
Как оценить платежеспособность организации на основании бухгалтерского баланса?
Если большая часть пассивов компании включает в себя долгосрочные обязательства, имеет смысл использовать другую, более сложную формулу. При расчетах используется дополнительный показатель – строка 1400. Рассмотрим вид второй формулы:
((Строка 1300 + строка 1400) – строка 1100) / строка 1300
Другая формула нужна в том случае, если большую часть структуры составляют краткосрочные обязательства:
(Строка 1200 – строка 1500) / строка 1300
Также для расчетов может быть использована эта формула:
((Строка 1300 + строка 1400 + строка 1530) – строка 1100) / (строка 1300 + строка 1530)
ВАЖНО! Формулу следует подбирать в соответствии с особенностями компании. Это обеспечит более точные результаты.
Это обеспечит более точные результаты.
Значения, используемые в формуле
В формуле используются следующие значения:
- Строка 1100 – внеоборотные активы.
- Строка 1200 – оборотные активы.
- Строка 1300 – капитал.
- Строка 1500 – обязательства краткосрочного вида.
Соответствующие показатели берутся из баланса.
Что означает тот или иной коэффициент
В результате расчетов по формуле получается определенный коэффициент. На основании его можно судить об особенностях деятельности компании. Рассмотрим значение того или иного коэффициента:
- Меньше 0,3. Такой коэффициент говорит о том, что у компании есть затруднения с развитием. Также это говорит о зависимости от заемных средств, пониженной платежеспособности. Что это обозначает на практике? Организации будет сложно получить займы. Кредиторы будут отказывать фирме из-за ее низкой платежеспособности. Отказывать будут и инвесторы, так как инвестиции в такую компанию не «обещают» получения прибыли.
- От 0,3 до 0,6. Это среднее значение. Оно обозначает нормальную платежеспособность, относительную независимость компании от сторонних средств.
- Больше 0,6. Обозначает высокий уровень платежеспособности, независимость фирмы. Однако точная интерпретация определяется структурой нынешних займов, уровнем ликвидности средств.
Коэффициент 0,6 вовсе не обязательно свидетельствует о хорошем состоянии компании. Все зависит от специфики ее хозяйственной деятельности. Если фирма берет долгосрочные (со сроком погашения от 1 года) займы, коэффициент 0,6 обозначает зависимость компании от займов. Связано это с тем, что прибыль предприятия будет направляться на уплату процентов. По этой причине существуют сложности с модернизацией и расширением компании. Средств на это в достаточном объеме просто нет.
Важно! Если большая часть займов является краткосрочной (со сроком погашения до года), коэффициент больше 0,6 обозначает независимость от кредиторов, а также наличие средств для модернизации производства. Соответственно, в таких условиях компания может успешно развиваться.
Соответственно, в таких условиях компания может успешно развиваться.
Если в компании наблюдается пониженный уровень ликвидности оборотных средств, успешной ее деятельность может считаться только в том случае, если коэффициент значительно превышает 0,6. Если он составляет ровно 0,6 или незначительно превышает этот уровень, это свидетельствует о недостатке свободных средств, которые могут быть направлены на улучшение производства.
Расшифровка коэффициента исходя из специфики отрасли
При интерпретации коэффициента нужно учитывать особенности отрасли, в которой работает компания. Разные отрасли предполагают различную норму рентабельности.
Промышленные, строительные предприятия, субъекты торговли являются низкорентабельными. В данном случае нормой считается более высокий коэффициент.
Для консалтинговых компаний, фирм, работающих в индустрии красоты, нормальной будет высокая рентабельность. В данном случае нормален относительно пониженный коэффициент.
Расшифровка коэффициента исходя из динамики
Нельзя понять состояние компании исходя из одного показателя. Для получения точных результатов нужно регулярно определять коэффициенты и сравнивать их друг с другом. Отслеживание значения в годовой динамике помогает отследить успешность развития компании. Если наблюдается стабильный рост коэффициента, это обозначает следующие аспекты:
Для получения точных результатов нужно регулярно определять коэффициенты и сравнивать их друг с другом. Отслеживание значения в годовой динамике помогает отследить успешность развития компании. Если наблюдается стабильный рост коэффициента, это обозначает следующие аспекты:
- Предприятие своевременно выплачивает займы и не берет все новые и новые кредиты.
- У предприятия есть ресурсы для расширения и модернизации, закупки нового оборудования.
- Компания имеет возможность продолжать финансирование своей деятельности даже в том случае, если доступ к займам закроется.
- Предприятие имеет возможность диверсифицировать производство.
Если коэффициент постепенно уменьшается, это свидетельствует о следующих фактах:
- Высокий уровень кредитной или общей платежной нагрузки. То есть у компании не хватает средств для самостоятельного финансирования своей деятельности.
- Пониженная прибыльность, возникшая вследствие неэффективного управления или других факторов.
- Невозможность в полном объеме инвестировать средства в модернизацию производства.
- Невозможность успешно диверсифицировать предприятие.
Об аналогичных характеристиках свидетельствует коэффициент, остающийся низким (0,3) на протяжении длительного времени.
ВАЖНО! Значение коэффициентов нужно анализировать на протяжении нескольких месяцев. Анализ динамики на протяжении другого времени (месяц, год) может не дать точных результатов. Анализ изменения коэффициента в течение одного месяца не отображает достаточной динамики. В этом случае показатель практически не изменится. Если же анализировать коэффициент на протяжении года, разброс значения будет слишком большим. Невозможно будет отследить причину изменения значения.
ВНИМАНИЕ! Что делать в том случае, если коэффициент снижается? Нужно искать причину. Следует отследить конкретный период, в котором произошло падение значения. Затем следует проанализировать, что именно произошло в этот период. Также причиной низкого коэффициента может являться неправильное управление компанией.
Также причиной низкого коэффициента может являться неправильное управление компанией.
Формула коэффициента маневренности собственного капитала по балансу
Понятие коэффициента маневренности
Наличие требуемым объемом собственных оборотных средств считается ключевым условием развития бизнеса, так как эти ресурсы чаще всего выступают в качестве основного источника инвестиционной деятельности и модернизации производства.
Формула коэффициента маневренности собственного капитала по балансу вычисляется путем отношения суммы собственных оборотных средств предприятия к показателю, который соответствует объему собственного капитала.
Формула коэффициента маневренности собственного капитала по балансу
Существуют несколько основных формул коэффициента маневренности, при расчете которых используют данные бухгалтерского баланса компании.
Самая простая формула коэффициента маневренности собственного капитала по балансу требует данные из строк 1100 и 1300 ББ. Разница между строкой 1300 и строкой 1100 составляет величину собственных оборотных средств предприятия. Строка 1300 показывает величину капитала компании.
Разница между строкой 1300 и строкой 1100 составляет величину собственных оборотных средств предприятия. Строка 1300 показывает величину капитала компании.
Первая формула коэффициента маневренности собственного капитала по балансу выглядит так:
КМ = (строка 1300 – строка 1100) / строка 1300
Когда в структуре пассивов предприятия существуют большие объемы долгосрочных обязательств, то формула коэффициента маневренности собственного капитала по балансу должна быть дополнена показателями строки 1400 бухгалтерского баланса. В результате формула примет следующий вид:
КМ= ((строка 1300 + строка 1400) — строка 1100) / строка 1300
Предприятия, которые имеют значительные объемы краткосрочных обязательств, могут рассчитывать коэффициент маневренности при помощи формулы, которая определяет величину собственных основных средств разницей между строкой 1200 и 1500 бухгалтерского баланса.
Третий вариант формулы при этом выглядит следующим образом:
КМ = (строка 1200 — строка 1500) / строка 1300
В экономическом анализе хозяйственной деятельности предприятия большое распространение нашла еще одна формула коэффициента маневренности собственного капитала по балансу, в которой задействованы показатели бухгалтерского баланса из строки 1530:
КМ=((строка 1300+ строка 1400+ строка 1530)— строка 1100)/(строка1300+ строка1530)
Нормативное значение
Формула коэффициента маневренности собственного капитала по балансу дает возможность получить следующую информацию:
- Доля собственных средств фирмы, которая находится в обороте;
- Степень финансовой независимости компании.
В зависимости от полученного значения по формуле можно судить об эффективностибизнес-модели компании:
- При значении коэффициента меньше 0,3, можно говорить о серьезных проблемах развития предприятия, высокой степени его зависимости от заемных источников, низкой платежеспособности. Часто в этой ситуации кредиторы вынуждены отказать фирме в предоставлении значительных сумм денежных средств, а инвесторы подвергают сомнению перспективу вложений в это дело.
- При нахождении коэффициента маневренностив интервале0,3-0,6 получается вполне оптимальное значение.
- При превышении коэффициентом маневренности значения 0,6, его интерпретация находится в зависимости от структуры текущих займов, включая степень ликвидности собственных оборотных средств.
Высокий коэффициент маневренности при наличии низкой ликвидности собственных оборотных средств предприятия считается приемлемым лишь в случае, когда значение превышает 0,6. Если же в данном случае коэффициент равен 0,6 (или больше), предприятие может начать испытывать сложности в сфере своевременной конвертации собственных оборотных средств в инвестиции, которые направлены на расширение (модернизацию) производства.
Примеры решения задач
Коэффициент маневренности — формула по балансу
Назначение коэффициента
Коэффициент маневренности показывает, какая часть собственного капитала может использоваться для финансирования оборотных активов, а какая направляться на финансирование внеоборотных активов.
При помощи этого коэффициента менеджмент организации сможет делать выводы о соотношении между собственными оборотными средствами и собственными капиталом, а также судить о зависимости от внешних заимствований.
Использование этого показателя для анализа финансово-хозяйственной деятельности заключается не только в его регулярном исчислении и сравнении с нормативным значением коэффициента маневренности собственного капитала, но и в отслеживании в динамике изменения его величины. Выводы на основе коэффициента маневренности следует делать с учетом отраслевой специфики бизнеса.
Как рассчитать коэффициент маневренности собственного капитала по формулам по балансу, расскажем далее.
Об одном из инструментов оценки финансового состояния бизнеса мы рассказали в статье «Горизонтальный и вертикальный анализ бухгалтерского баланса».
Более полную информацию по теме вы можете найти в КонсультантПлюс.Пробный бесплатный доступ к системе на 2 дня.
5 расчетных алгоритмов
Основная формула для расчета коэффициента маневренности (КМ):
Две следующие формулы расчета коэффициента маневренности собственных оборотных средств представляют собой расширенный вариант основного расчетного алгоритма — в числитель включаются дополнительные показатели в зависимости от структуры пассива баланса.
При наличии в структуре пассивов значительных объемов долгосрочных обязательств числитель формулы дополнится показателем стр. 1400:
Преобладание краткосрочных обязательств в балансе следующим образом трансформирует основную расчетную формулу:
С помощью следующей формулы также можно рассчитать коэффициент маневренности собственного капитала. Числитель и знаменатель одной из рассмотренных выше формул дополняется показателем стр. 1530:
Подпишитесь на рассылку
Еще один коэффициент маневренности, используемый в анализе финансово-хозяйственной деятельности, носит название коэффициента маневренности функционирующего капитала. В расчете принимают участие медленно реализуемые активы, оборотные активы и текущие обязательства:
С помощью этого коэффициента можно получить более точную характеристику возможности организации оплачивать текущие расходы.
Детально знакомьтесь с разнообразными формулами с помощью наших публикаций:
С чем сравнить результат
Полученную в результате расчета величину сравнивают с нормативными значениями и делают выводы:
Важно исследование коэффициента маневренности в динамике — последовательно за ряд периодов:
Исследование в динамике коэффициента маневренности функционирующего капитала показывает изменение доли функционирующего капитала, обездвиженного в производственных запасах и долгосрочной дебиторской задолженности. Его снижение имеет положительный эффект для организации.
Какими способами граждане могут маневрировать собственным капиталом, узнайте из статей:
***
Коэффициент маневренности собственного капитала показывает соотношение межу собственными оборотными средствами и собственным капиталом. Данные для его исчисления берутся из бухгалтерского баланса. Есть несколько формул расчета коэффициента маневренности собственного капитала. Важно отслеживать изменение данного финансового показателя в динамике.
***
Больше полезной информации по теме — в рубрике «Бизнес».
Коэффициенты финансовой устойчивости
Одной из характеристик стабильного положения предприятия служит его финансовая устойчивость.
Нижеприведенные коэффициенты финансовой устойчивости, характеризуют независимость по каждому элементу активов предприятия и по имуществу в целом, дают возможность измерить, достаточно ли устойчива компания в финансовом отношении.
Коэффициент автономии
Коэффициент финансовой зависимости
Коэффициент соотношения заемных и собственных средств
Коэффициент маневренности собственных оборотных средств
Коэффициент соотношения мобильных и иммобилизованных активов
Коэффициент обеспеченности оборотного капитала собственными источниками финансирования
Коэффициент обеспеченности собственными средствами
Коэффициент обеспеченности запасов собственными средствами
Коэффициент сохранности собственного капитала
Наиболее простые коэффициенты финансовой устойчивости характеризуют соотношения между активами и обязательствами в целом, без учета их структуры. Важнейшим показателем данной группы является коэффициент автономии (или финансовой независимости, или концентрации собственного капитала в активах).
Устойчивое финансовое положение предприятия – это результат умелого управления всей совокупностью производственных и хозяйственных факторов, определяющих результаты деятельности предприятия. Финансовая устойчивость обусловлена как стабильностью экономической среды, в рамках которой осуществляется деятельность предприятия, так и от результатов его функционирования, его активного и эффективного реагирования на изменения внутренних и внешних факторов.
Основной задачей анализа финансовой устойчивости предприятия является оценка степени независимости от заемных источников финансирования. В процессе анализа необходимо дать ответы на вопросы: насколько компания независима с финансовой точки зрения, растет или снижается уровень этой независимости и отвечает ли состояние его активов и пассивов задачам ее финансово-хозяйственной деятельности.
В классической теории анализа финансовой отчетности под финансовой устойчивостью понимают такое соотношение активов и обязательств организации, которое гарантирует определенный уровень риска несостоятельности организации. Таким образом, в качестве показателей финансовой устойчивости могут быть использованы коэффициенты, характеризующие структуру актива и пассива баланса, а также соотношения между отдельными статьями актива и пассива (относительные показатели финансовой устойчивости).
Коэффициент автономии (финансовой независимости, концентрации собственного капитала в активах)
Характеризует независимость предприятия от заемных средств и показывает долю собственных средств в общей стоимости всех средств предприятия. Чем выше значение данного коэффициента, тем финансово устойчивее, стабильнее и более независимо от внешних кредиторов предприятие:
Коэффициент автономии (независимости) = Собственный капитал / Активы
Ка = (стр. 490 + стр. 640 + стр.650) / стр. 700 форма №1
или
Ка =стр. 490 / стр. 700
По форме бухбаланса с 2011 года формула имеет вид: Ка = стр. 1300 / стр. 1600
Нормативным общепринятым значением показателя считается значение коэффициента автономии больше 0,5 но не более 0,7. Но необходимо учитывать то что, коэффициент независимости значительно зависит от отраслевой специфики (соотношения внеоборотных и оборотных активов). Чем выше у предприятия доля внеоборотных активов (производство требует значительного количества основных средств), тем больше долгосрочных источников необходимо для их финансирования, а это означает что, больше должна быть доля собственного капитала (выше коэффициент автономии).
Отметим что, в международной практике распространен показатель debt ratio (коэффициент финансовой зависимости), противоположный по смыслу коэффициенту автономии, но тоже характеризующий соотношение собственного и заемного капитала. Достаточно высоким уровнем коэффициента независимости в США и европейских странах считается 0,5-0,6. При этом сумма обязательств не превышает величины собственных средств, что обеспечивает кредиторам приемлемый уровень риска. В странах Азии (Япония, Южная Корея) достаточным считается значение 0,3. При отсутствии обоснованных нормативов данный показатель оценивается в динамике. Уменьшение значения свидетельствует о повышении риска и снижении финансовой устойчивости. Причем, с увеличением доли обязательств не только повышается риск их непогашения, кроме того, возрастают процентные расходы, и усиливается зависимость компании от возможных изменений процентных ставок.
Коэффициент финансовой зависимости
Коэффициент финансовой зависимости, характеризующий зависимость от внешних источников финансирования (т.е. какую долю во всей структуре капитала занимают заемные средства). Показатель широко применяется на западе. Показатель определяется как отношение общего долга (суммы краткосрочных обязательств и долгосрочных обязательств ) и суммарных активов.
Коэффициент финансовой зависимости = Обязательства / Активы
В соответствии с Приказом Минрегиона РФ от 17.04.2010 №173 коэффициент финансовой зависимости определяется по формуле:
Кфз = (Д0 + КО — Зу + Дбп + Р) / П
где,
Кфз — коэффициент финансовой зависимости;
Д0 — долгосрочные обязательства;
КО — краткосрочные обязательства;
Зу — задолженность перед учредителями;
Дбп — доходы будущих периодов;
Р — резервы предстоящих расходов;
П — пассивы.Кфз = (стр. 590 + стр. 690 — стр. 630 — стр. 640 — стр. 650) / стр. 700 ф. №1
Кфз = (стр. 1400 + стр. 1500 — Зу — стр. 1530 — стр. 1540) / стр. 1700
Отметим что, строка «Задолженность перед участниками (учредителями) по выплате доходов» (в прежней форме – код 630) исключена из новой формы, поскольку эта задолженность является кредиторской и может быть раскрыта в пояснениях к финансовой отчетности.
Рекомендуемое значение данного коэффициента должно быть меньше 0,8. Оптимальным является коэффициент 0.5 (т.е. равное соотношение собственного и заемного капитала). При значении показателя меньше 0,8 говорит о том, что обязательства должны занимать менее 80% в структуре капитала.
Коэффициент соотношения заемных и собственных средств
Этот коэффициент дает наиболее общую оценку финансовой устойчивости. Показывает, сколько единиц привлеченных средств приходится на каждую единицу собственных средств:
Коэффициент соотношения заемного и собственного капитала = Заемный капитал / Собственный капитал
Кзс = (стр. 590 + стр. 690 — стр. 640 — стр. 650) / (стр. 490 + стр. 640 + стр. 650) форма №1
или
Кзс = (стр.590 + стр.690) / стр.490
Кзс = (стр. 1500 + стр. 1400) / стр. 1300
Анализируют изменение значения показателя в динамике. Рост показателя в динамике свидетельствует об усилении зависимости предприятия от внешних инвесторов и кредиторов. Рекомендуемое значение Кзс <0,7. Оптимальное соотношение заемных и собственных средств 0,5 < Кзс < 0,7. Превышение значения коэффциента значения 0,7, т.е. Кзс >0,7 сигнализирует о том, что финансовая устойчивость предприятия вызывает сомнение.
Чем выше значение показателя, тем выше степень риска инвесторов, поскольку в случае невыполнения обязательств по платежам возрастает возможность банкротства.
Коэффициент маневренности собственных оборотных средств (коэффициент маневренности собственного капитала)
Данный коэффициент показывает, какая часть собственного оборотного капитала находится в обороте. Коэффициент маневренности должен быть достаточно высоким, чтобы обеспечить гибкость в использовании собственных средств:
Коэффициент маневренности собственных оборотных средств = Собственные оборотные средства / Собственный капитал
Км = (стр. 490 — стр. 190) / стр. 490 форма №1
Км = (стр. 1300 — стр. 1100) / стр. 1300
Резкий рост данного коэффициента не может свидетельствовать о нормальной деятельности предприятия, т.к. увеличение этого показателя возможно либо при росте собственного оборотного капитала, либо при уменьшении собственных источников финансирования. Рекомендуемое значение коэффициента 0,2 – 0,5.
Коэффициент соотношения мобильных и иммобилизованных активов
Показывает сколько внеоборотных активов приходится на каждый рубль оборотных активов:
Коэффициент соотношения мобильных и иммобилизованных активов = Оборотные активы / Внеоборотные активы
Км/и = (стр. 190 + стр. 230) / (стр. 290 — стр. 244 — стр. 252) форма №1
или
Км/и = стр. 190 / стр. 290
Км/и = стр. 1100 / стр. 1200
Для данного показателя нормативных значений не установлено.
Коэффициент обеспеченности оборотного капитала собственными источниками финансирования
Коэффицент показывает наличие у предприятия собственных средств, необходимых для его финансовой устойчивости:
Коэффициент обеспеченности оборотного капитала собственными источниками финансирования = (Собственный капитал — Внеоборотные активы) / Оборотные активы
Ко = (стр. 490 — стр. 190)/(стр. 290 — стр. 230) форма №1
Ко = (стр. 1300 — стр. 1100) / стр. 1200
В методической литературе указывается что, предприятие обеспечено собственными источниками финансирования оборотного капитала при значении коэффициента ≥0,1.
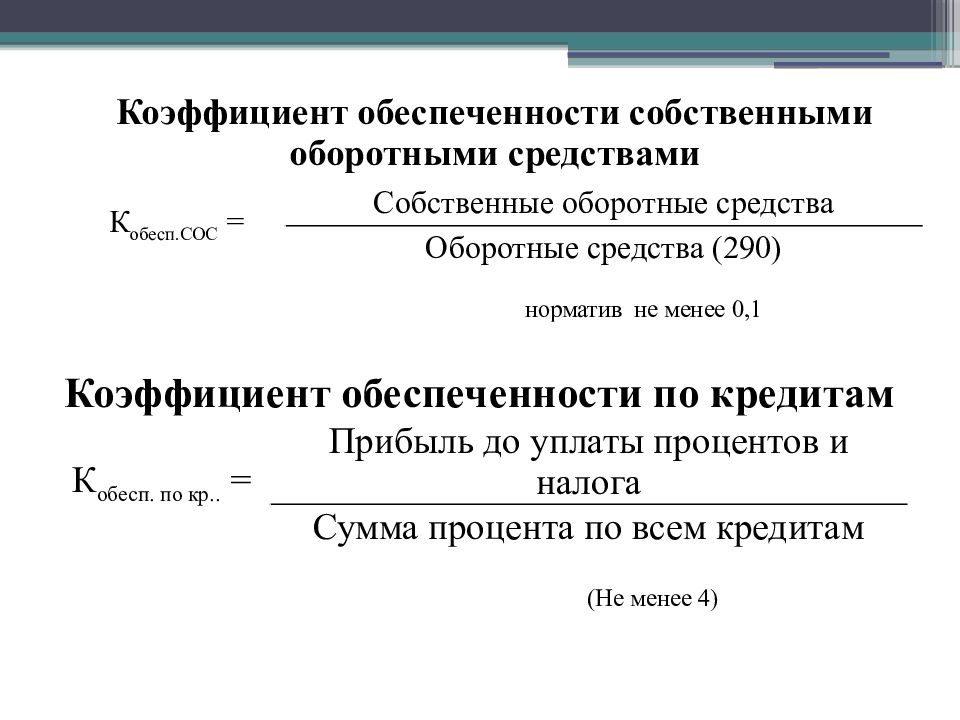
Коэффициент обеспеченности собственными средствами
Коэффициент обеспеченности собственными оборотными средствами показывает достаточность у предприятия собственных средств, необходимых для финансирования текущей (операционной) деятельности, т.е. обеспечения финансовой устойчивости. Данный показатель был введен нормативно Распоряжением ФУДН от 12.08.1994 №31-р, в западной практике финансового анализа не распространен.
Формула расчета коэффициента обеспеченности собственными оборотными средствами имеет вид:
Коэффициент обеспеченности собственными средствами = (Собственный капитал — Внеоборотные активы) / Оборотные активы
Ксос = (стр. 490 — стр. 190) / стр. 290 форма №1
Ксос = (стр. 1300 — стр. 1100) / стр. 1200
Согласно вышеуказанному распоряжению показатель используется как признак несостоятельности (банкротства) предприятия. Нормальное значение показателя обеспеченности собственными средствами должно составлять не менее 0,1.
Коэффициент обеспеченности запасов собственными средствами
Коэффициент обеспеченности материальных запасов собственными средствами – показатель характеризующий уровень финансирования запасов за счет собственных источников (средств) предприятия.
Формула расчета коэффициента имеет вид:
Коэффициент обеспеченности запасов собственными средствами = Собственные оборотные средства / Запасы
Коз = (стр. 490 + стр. 590 — стр. 190) / стр. 210
Коз = (стр. 1300 + стр. 1400 — стр. 1100) / стр. 1210
В практике встречается модифицированная методика расчета этого показателя, запасы дополняются затратами (затраты в незавершенном строительстве и авансы поставщикам и подрядчикам). В этом случае формула расчета коэффициента обеспеченности запасов и затрат собственными оборотными средствами примет вид:
Коз = (Собственный капитал + Долгосрочные обязательства — Внеоборотные активы) / (Запасы + Затраты в незавершенном производстве + Авансы поставщикам и подрядчикам)
Нормативное значение коэффициента лежит в диапазоне от 0,6 до 0,8, т.е. формирование 60-80% запасов предприятия должно осуществляться за счет собственных средств. Чем выше значение показателя, тем меньше зависимость предприятия от заемного капитала в части формирования запасов и, следовательно, выше финансовая устойчивость организации.
Коэффициент сохранности собственного капитала
Показатель характеризует динамику собственного капитала. Коэффициент рассчитывается как отношение собственного капитала на конец периода к собственному капиталу на начало периода:
Коэффициент сохранности собственного капитала = Собственный капитал на конец периода /Собственный капитал на начало периода
Кскс = стр. 490 к.п. / стр. 490 н.п.
Кскс = стр. 1300 к.п. / стр. 1300 н.п.
Оптимальное значение коэффициента больше или равно 1.
Отметим что, в отличие от других коэффициентов устойчивости, это показатель не структурный, а динамический, поэтому он может соответствовать необходимому значению и при общем ухудшении финансовой ситуации.
Правила проведения арбитражным управляющим финансового анализа, указанные выше в списке стандартных методик анализа финансового состояния, предполагают также для оценки финансовой устойчивости рассчитывать такие показатели, как:
- доля просроченной кредиторской задолженности в пассивах;
- отношение дебиторской задолженности к совокупным активам.
Причем в составе дебиторской задолженности учитывается не только краткосрочная и долгосрочная дебиторская задолженность по балансу, но также и «потенциальные оборотные активы к возврату», под которыми понимаются: списанная в убыток сумма дебиторской задолженности и сумма выданных гарантий и поручительств. Информация об этих «активах» раскрывается в прилагаемой к балансу справке о наличии ценностей, учитываемых на забалансовых счетах. Предполагается, что при благоприятном для организации стечении обязательств эти суммы могут быть ею получены и использованы для погашения обязательств.
Анализ устойчивости финансового состояния на ту или иную дату позволяет выяснить, насколько правильно предприятие управляло финансовыми ресурсами в течение периода, предшествующего этой дате. Важно, чтобы состояние финансовых ресурсов соответствовало требованиям рынка и отвечало потребностям развития предприятия, поскольку недостаточная финансовая устойчивость может привести к неплатежеспособности предприятия и отсутствию у него средств для развития производства, а избыточная – препятствовать развитию, отягощая затраты предприятия излишними запасами и резервами. Таким образом, сущность финансовой устойчивости определяется эффективным формированием, распределением и использованием финансовых ресурсов.
Финансовое положение предприятия считается устойчивым, если оно покрывает собственными средствами не менее половины финансовых ресурсов, необходимых для осуществления нормальной хозяйственной деятельности, эффективно использует финансовые ресурсы, соблюдает финансовую, кредитную и расчетную дисциплину, иными словами, является платежеспособным.
Финансовое положение определяется на основе анализа ликвидности и платежеспособности, а также оценки финансовой устойчивости. Анализ финансовой устойчивости компании проводят как коэффициентным методом, так и с помощью анализа показателя чистые активы и при помощи анализа абсолютных показателей.
Коэффициент маневренности функционального капитала
Определение
Коэффициент маневренности функционального капитала — это доля запасов в функциональном капитале.
А функциональный капитал (собственные текущие активы) — это разность между текущими активами и краткосрочными обязательствами групп П1 и П2.
Отмечу, что часто используется и более простой вариант расчёта функционального капитала. Использовать можно любой.
Формула расчёта (по отчётности)
Сначала необходимо определить П1 и П2, а затем подставить их в формулу:
Строка 1210 / (строка 1200 бухгалтерского баланса — (П1 плюс П2))
Норматив
0,2 — 0,5
Выводы о том, что означает изменение показателя
Если показатель выше нормы
Повышенный уровень запасов в собственных текущих активах (в функциональном капитале)
Если показатель ниже нормы
Пониженный уровень запасов в собственных текущих активах (в функциональном капитале)
Если показатель увеличивается
Избыточное повышение — скорее негативный фактор, поскольку указывает на рост затоваренности предприятия.
Если показатель уменьшается
Даже избыточное снижение — скорее позитивный фактор.
Примечания
Показатель в статье рассматривается с точки зрения не бухучёта, а финансового менеджмента. Поэтому иногда он может определяться по-разному. Это зависит от авторского подхода.
В большинстве случаев в вузах принимают любой вариант определения, поскольку отклонения по разным подходам и формулам обычно находятся в пределах максимум нескольких процентов.
Показатель рассматривается в основном бесплатном сервисе финансовый анализ онлайн и некоторых других сервисах
Если после расчёта показателей вам нужны выводы, посмотрите, пожалуйста, эту статью: выводы по финансовому анализу
Если вы увидели какую-то неточность, опечатку — также, пожалуйста, укажите это в комментарии. Я стараюсь писать максимально просто, но если всё же что-то не понятно — вопросы и уточнения можно писать в комментарии к любой статье сайта.
С уважением, Александр Крылов, anfin.ru
Коэффициент нагрузки— обзор
IV.C Разворот полета
Даже несмотря на то, что самолет может проводить большую часть полета в прямом полете, бывают моменты, когда он должен повернуть. Для всех самолетов есть развороты, связанные с изменением курса полета, предотвращения столкновений, захода на посадку и посадки по приборам. Боевые самолеты должны обладать большей маневренностью, чем транспортные средства, чтобы выжить и выполнять свои боевые задачи. Способность летательного аппарата к маневрированию, наряду с соответствующими конструктивными и полетными параметрами, может быть определена в первом приближении путем ограничения полета при развороте горизонтальной плоскостью и принятия веса постоянным, а угол бокового скольжения равным нулю.Представляющими интерес параметрами маневрирования являются (максимальная) скорость поворота и (минимальный) радиус поворота.
Соответствующие стационарные уравнения движения:
(47) T = D
(48) Lsinϕ = WgVχ˙
(49) Lcosϕ = W
, где χ˙ — скорость поворота (рад / с) и ϕ угол крена (градусы). Эти уравнения показывают, что сопротивление уравновешивается тягой, центробежная сила уравновешивается горизонтальной составляющей подъемной силы, а вес уравновешивается вертикальной составляющей подъемной силы.При нулевом угле скольжения (согласованные повороты) вектор подъемной силы всегда лежит в плоскости симметрии.
Отношение подъемной силы к массе L / W называется коэффициентом нагрузки, обозначается символом n и имеет единицы измерения г ‘s. Он называется коэффициентом нагрузки, потому что это мера сил или нагрузки, воздействующих на конструкцию или людей. Например, горизонтальный полет часто обозначается как полет l- g , потому что L = W и n = 1.Когда n равно 2, подъемная сила вдвое превышает вес самолета, а размах крыла, например, должен выдерживать нагрузку, которая в два раза превышает вес самолета, без повреждений или недопустимых прогибов. Точно так же человек в самолете подвергается дополнительной силе, равной его весу. Если коэффициент нагрузки превышает допуски конструкций или людей, могут возникнуть временные или необратимые повреждения.
Используя определение коэффициента нагрузки и уравнения. (47), можно записать уравнение.(49) как:
(50) n = L / W = 1 / (cosϕ) = (T / W) E
, что показывает прямую связь с углом крена и произведением тяги на вес. и отношения подъемной силы к лобовому сопротивлению. Для любого коэффициента нагрузки соответствующий угол крена равен
(51) ϕ = cos − 1 (1 / n)
Когда n равно единице, подъемная сила равна весу, а угол крена равен нулю. Когда угол крена равен нулю, уравнение. (48) показывает, что скорость поворота также равна нулю, указывая на то, что не может быть установившегося скоординированного поворота без конечного угла крена.Когда угол крена составляет 90 °, коэффициент нагрузки становится бесконечным, что означает, что самолет не может поддерживать скоординированный установившийся разворот с углом крена 90 ° и по-прежнему удерживать постоянную высоту. Повороты с углом крена 90 ° могут быть выполнены только за счет заноса или снижения или набора высоты, причем последнее требует T / W больше 1.
Соответствующие выражения для χ˙:
(52) χ ˙ = gtanϕV = g (n2−1) 1 / 2V
, где χ˙ — в радианах в секунду, V — в футах в секунду, а г принимается равным 32.2 фут / сек 2 . Поскольку воздушная скорость V является тангенциальной скоростью, равной χ˙r, выражения для r имеют вид
(53) r = Vχ˙ = V2gtanϕ = V2g (n2−1) 1/2
The D / W Отношение , используя параболическую поляру сопротивления, можно записать:
(54) DW = qCD0W / S + Kn2 (W / S) q.
, который, если задан равным T / W , может быть решен для воздушной скорости поворота,
(55) y = {T / SρSLσCD0 [1 ± (1 − n2 [Em (T / W)] 2) 1/2]} 1/2
У этих выражений есть несколько интересных моментов.Когда подъемная сила равна весу, коэффициент нагрузки равен единице, а значения поворота уменьшаются до значений для горизонтального полета, как и следовало ожидать. Когда коэффициент нагрузки больше единицы, например, при развороте, воздушная скорость будет меньше, чем при горизонтальном полете. Следовательно, пилот должен увеличивать тягу при входе в разворот, если и воздушная скорость, и высота должны оставаться постоянными. Также следует отметить, что указание угла крена (и, следовательно, коэффициента нагрузки) и соотношения T / W определяет воздушную скорость и скорость поворота для данной высоты и что могут быть две возможные комбинации.Мало того, что воздушная скорость падает в повороте, если тяга не увеличивается, но и скорость сваливания увеличивается как квадратный корень из коэффициента нагрузки. Например, угол крена 30 ° ( n = 1,155) увеличивает скорость сваливания на уровне крыла на 7,5%.
Решение уравнений скорости и радиуса разворота для нескольких комбинаций воздушной скорости приводит к выводу, что более низкая скорость и меньшая высота дают лучшие характеристики поворота. с точки зрения более высокой скорости поворота и меньшего радиуса поворота.
Проверка уравнения. (50) показывает, что для данного T / W максимальный коэффициент нагрузки (и максимальный угол крена) возникает, когда E является максимальным, и что наибольшее значение максимально возможного коэффициента нагрузки возникает, когда оба T / W и E находятся на максимальном уровне. Из-за конструктивных ограничений (или комфорта пассажиров) воздушные суда ограничены условиями полета, которые не превышают максимально допустимый коэффициент загрузки, который для транспорта составляет порядка 2.5 г и для истребителя порядка 8 г . Иллюстративный турбореактивный двигатель имеет максимально возможный коэффициент нагрузки на уровне моря 4,6 г . Если самолет не должен превышать 2,5 g , соотношение T / W не должно превышать 0,137 g . Максимально возможный коэффициент нагрузки уменьшается с высотой (уменьшение T / W ), становясь единицей на абсолютном потолке, так что максимальный угол крена равен нулю. Самолет не может уверенно разворачиваться на абсолютном потолке, не теряя высоты.
Максимальная скорость поворота (самый быстрый разворот) и минимальный радиус разворота (самый крутой разворот) являются истинными показателями маневренности самолета. Оба достигаются при низких скоростях полета и на уровне моря. Как следствие, бой воздух-воздух может начаться в точках M 2 — M 3 и на высоте 50 000–60 000 футов, но, если он будет продолжен, он будет замедляться и снижаться до тех пор, пока не будет достигнута арена боя на низкой скорости или высоте или пока один из самолет уничтожен. Нижний предел боевой воздушной скорости — это скорость сваливания в развороте, а нижний предел боевой высоты — минимальная высота, необходимая для отрыва от маневра уклонения.Высокоманевренный самолет должен иметь большой T / W , низкий W / S , большое удлинение и эффективность пролета Освальда, низкий C D0 и большую максимальную подъемную силу. коэффициент. Большинство этих характеристик можно увидеть в современном самолете, предназначенном для маневрирования в бою, за исключением большого удлинения, которое остается небольшим из соображений конструкции и веса.
Есть два различия между самыми быстрыми поворотами и самыми крутыми поворотами.Коэффициент нагрузки при самом быстром повороте пропорционален квадратному корню из максимально возможного коэффициента нагрузки и не имеет теоретического верхнего предела, тогда как коэффициент нагрузки при самом жестком повороте не может превышать 1,414 г . Воздушные скорости при самом крутом развороте даже ниже, чем при самом быстром развороте, и обычно меньше, чем скорость сваливания для истребителей, что является физически невозможной ситуацией.
(PDF) Структура анализа маневренности самолета (AIAA-95-3448)
VI. Благодарности
Авторы хотят поблагодарить Кармен Мацца за несколько оживленных дискуссий по аджилити.Мы также хотим поблагодарить
Марка Берджесса и Дуга Ильгенфрица из Boeing, а также Боба Шоу из Fighter Command International за
их полезные идеи. Наконец, мы хотели бы выразить нашу признательность членам AGARD Working
Group 19, обсуждения которых послужили стимулом для представленных разработок.
Ссылки
1Стутц Р. Г. и Прайс Г., «Характеристики маневренности нескольких самолетов с вертикальным и вертикальным взлетом и посадкой», Journal of Aircraft, Vol. 1,
No.5. 1964. С. 267–272.
2Лоулесс, А. Р. и Баттс, С. Л., «Исследования и разработки в области измерения маневренности самолетов», Tech. Представитель AFFTC-TIM-
91-01, Центр летных испытаний ВВС, авиабаза Эдвардс, Калифорния, июнь 1991 г.
3Уилсон, Д.Д., Райли, Д.Р., и Цитурс, К.Д., «Маневры самолета для оценки летных качеств» и Agility,
Том 1: Процесс разработки маневра и начальный набор маневра », Tech. Представитель WL-TR-93-3081, Управление динамики полета,
Лаборатория Райта, База Райт-Паттерсон, Огайо, август.1993.
4Wilson, D. J., Riley, D. R., and Citurs, K. D., «Маневры самолета для оценки летных качеств и маневренности, Том
2: Описание маневров и руководство по выбору», Tech. Представитель WL-TR-93-3082, Управление динамики полета, Лаборатория Райта,
AFB Райт-Паттерсон, Огайо, август 1993 г.
5Herbst, W. и др., «Оценка маневренности самолетов будущего», Tech . Представитель MBB / LKE 1 / X-31A / R / 29, Messerschmitt-
B¨olkow-Blohm, ноябрь 1987 г.
6Mazza, C.Дж., «Гибкость: рациональное развитие фундаментальных показателей и их связь с летающими качествами»,
AGARD Conference Proceedings No. 508: Flying Qualities, AGARD, октябрь 1990 г.
7Kalviste, J., «Меры заслуг перед Динамическое маневрирование самолета (SAE 5) », Aerospace Atlantic Conference
Proceedings, SAE, апрель 1990 г.
8Foltyn, RW и др.,« Разработка инновационных средств ведения боевых действий для сверхманевренных истребителей », Tech.
Реп.AFWAL-TR-87-3073, Авиационные лаборатории Райта, авиабаза Райт-Паттерсон, Огайо, октябрь 1987 г.
9Скоу, А. М. и др., «Переходные улучшения маневренности для тактических самолетов, Том II», Tech. Rep. TR89-001, Eidetics
International, Торранс, Калифорния, январь 1989 г.
10Hodgkinson, J. et al., «Переходные улучшения маневренности для тактических самолетов, Том III», Tech. Представитель TR89-001, Eidetics
International, Торранс, Калифорния, январь 1989 г.
11Hodgkinson, J.и Ходжкинсон, Р.К., «Переходная маневренность и летные качества истребителя», представленная на семинаре AIAA Work-
«Исследование летных качеств — каковы реальные проблемы?», август 1987 г.
12Ходжкинсон, Дж. и другие, « Взаимосвязь между летными качествами, переходной маневренностью и эксплуатационной эффективностью
истребителей (AIAA 88-4329) », Труды конференции AIAA по механике атмосферного полета, AIAA, август 1988 г.
13 Райли, Д. Р. и Дражеске, М. Х., «Взаимосвязь между показателями маневренности и летными качествами (SAE 3)», SAE
Aerospace Atlantic Conference, SAE, апрель 1990 г.
14Бисе, М. Э. и Блэк, Г. Т., «Зависит ли маневренность от летных качеств?» Национальная конференция по аэрокосмической электронике
(NAECON), IEEE, май 1990 г., стр. 484–489.
15Бургесс, М. А. и Ильгенфриц, Д. Х., «Основы для понимания и изучения маневренности самолетов», Boeing Military
Airplanes Division, январь 1991 г., презентация Национальной руководящей группе Министерства обороны США на авиабазе Эдвардс, Калифорния.
16Скоу А. М., «Гибкость как фактор, способствующий сбалансированности конструкции», Journal of Aircraft, Vol. 29, No. 1, 1992, pp. 34–46.
13 из 13
Американский институт аэронавтики и астронавтики Документ 95–3448
Страница не найдена | Raptor Scientific
- Markets
- Aerospace
- Defense
- Space
- Marine
- Other Markets
- Applications
- Weapons Systems
- Hypersonics
- Aviation
- Gimbals 9023 Авионика
- Подвесы
- Поперечное сечение радара
- Реактивные двигатели
- Военная авиация и авионика
- Подвесы
- Поперечное сечение радиолокатора
- Реактивные двигатели 5 Реактивные двигатели
2
5 Беспилотные спутники 9023 Космические аппараты - Weapons Systems
- Космические аппараты
- Воздушные подшипники
- Калибраторы данных по воздуху
- Системы проверки данных по воздуху
- Тестеры цепей зажигания / запальника
- Массовые характеристики потери скорости промежуточного качения
- Свойства полной массы
- Вес и центр тяжести
- Момент инерции
- Балансировка карданного подвеса
- Центр плавучести
- Балансировка лопастей
- Момент инерции управляющей поверхности
- Продукт инерции (POI)
- Наборы для статических испытаний
- Радиолокационные измерения поперечного сечения
- infiniSCAN
- SCI-Xe-AC
- SCI-2k-ES
- SCI-2k-B2A
- Продукция и вспомогательное оборудование
- Услуги по калибровке
- Инжиниринг
- Лизинг
- Измерение
- Ремонт и капитальный ремонт
- Обучение
- Наша цель и культура
- Наши компании
- Space Electronics
- Sensor Concepts Inc.
- Testvonics
- Совет директоров
- Управленческая команда
- Карьера
- Расчет момента инерции
- Определение терминов массовых характеристик
- Определение терминов точности приборов для определения массовых свойств
- Определить POI
- Как измерить MOI с помощью CG
- Центр тяжести
- Выбор инструмента для измерения массовых характеристик
- Все ресурсы
- Продукты
- О нас
- Контакты 9024 Меню
- Продукты
- Приложения
- Контакты
- Поиск
Сколько лошадиных сил мне нужно для моей лодки
Если вы искали лодку для покупки или достигли точки, в которой хотели чтобы получить новый двигатель, скорее всего, вы просили вопрос: «Сколько лошадиных сил мне нужно для моей лодки?» Хотя индивидуальные проблемы могут быть разными — желание убедиться, достаточно ли лошадиных сил или не слишком много лошадиных сил — это вопрос, который задают многие люди, которые заинтересованы в покупке новой лодки.
Иногда возникает следующий вопрос: «Разве незаконно перегонять лодку?» Независимо от того, задавали ли вы себе один из этих вопросов или вам просто интересно, как мощность в лошадиных силах может повлиять на стоимость топлива и страховку, мы собрали несколько фрагментов информации, чтобы научить вас лошадиным силам. Прочитав эту информацию, вы сможете больше узнать о том, откуда она взялась, как она рассчитывается, как определить, сколько вам нужно, и какие опасности несет с собой слишком много.
Что такое мощность?лошадиных сил определяется как единица мощности, равная 550 фут-фунтам в секунду, используемая для измерения мощности двигателя. Сегодня это применимо к лодочным и автомобильным двигателям, но первоначально оно использовалось для описания мощности парового двигателя. В конце 1700-х годов шотландский инженер по имени Джеймс Ватт изобрел первый паровой двигатель, который усовершенствовал конструкцию, впервые разработанную Томасом Ньюкоменом в 1712 году. Это было большое дело. Этот новый паровой двигатель мог выполнять тот же объем работы, что и бывший двигатель Ньюкомена, но потреблял только четверть топлива.
К сожалению, сравнение парового двигателя с двигателем Ньюкомена не было эффективным маркетингом, поскольку большая часть населения все еще использовала лошадей для механической работы. Чтобы продавать свой новый продукт этой аудитории, Ватт знал, что ему нужно придумать способ сравнить работу лошадей с работой своего изобретения. В ходе своих экспериментов он определил, что одна лошадь может выполнять около 33000 футов-фунтов работы за одну минуту — это означает, что лошадь может поднять 33000-фунтовый вес на один фут за одну минуту.Поэтому он определил одну лошадиную силу как 33 000 фут-фунтов работы в минуту — или 550 фут-фунтов в секунду.
В этом новом измерении было несколько недостатков, самый большой из которых предполагал, что лошадь может продолжать работать с такой постоянной скоростью, а не утомляться. Однако Ватт не позволил этому факту беспокоить его, как и его клиентов. Сравнение мощности лошади с мощностью паровой машины показало, что паровая машина Ватта могла выполнять работу пяти лошадей, и впоследствии она стала неотъемлемой частью промышленной революции.
Как рассчитывается мощность в лошадиных силах?Значение лошадиных сил, измеряемое 550 фут-фунтами в секунду, не прекратилось с промышленной революцией. Измерение лошадиных сил было преобразовано в другие единицы измерения. Например, другие эксперименты определили, что одна лошадиная сила равна 746 ваттам энергии. Другими словами, если вы поместите одну лошадиную силу на беговую дорожку, она сможет управлять генератором мощностью 746 Вт. Инженеры также провели расчеты, чтобы связать мощность в лошадиных силах с крутящим моментом, что особенно важно для лодочных двигателей.
Torque проще всего объяснить на примере. Представьте, что у вас есть большой торцевой гаечный ключ с двухфутовой рукояткой. Вы прикладываете к этой ручке 50 фунтов силы — при этом вы прикладываете крутящий момент или поворачивающее усилие в общей сложности 100 фунт-футов к жирному шрифту. Имейте в виду, что при таком расчете вы можете получить тот же результат — крутящий момент 100 фунт-футов — приложив один фунт силы к торцевому ключу с рукояткой на 100 футов или приложив 100 фунтов силы к торцевому ключу. с ручкой на одну ногу.
В двигателе крутящий момент производит мощность, поэтому возможность соотнести его с мощностью имеет решающее значение. Устройство, называемое динамометром, нагружает двигатель, а затем измеряет мощность, которую он производит, для определения крутящего момента. Также доступны морские динамометры — с учетом работы лодки путем моделирования работы на воде. После определения крутящего момента вы можете преобразовать крутящий момент в лошадиные силы, умножив крутящий момент на количество оборотов в минуту (об / мин) и разделив полученное произведение на 5 252.Делитель 5 252 получен в результате серии вычислений, которые преобразуют число оборотов в минуту в радианы в секунду.
Используя динамометр, вы сможете увидеть зависимость мощности от числа оборотов двигателя, что особенно важно для расчета пиковой мощности. У двигателей будет точка об / мин, при которой мощность, доступная от двигателя, достигнет своего максимума. Это известно как пиковая мощность — часто документируется как «___ л.с. при ____ об / мин».
Определение необходимой мощностиКак только вы поймете историю лошадиных сил и как это связано с расчетами, которые мы используем сегодня, естественно задаться вопросом, сколько лошадиных сил нужно вашей лодке.При определении необходимой мощности необходимо учитывать несколько факторов: ограничения и рекомендации производителя, соотношение мощности и веса лодки, топливная эффективность, использование лодки, количество людей на лодке и отрасль. практическое правило. Вот несколько вещей, которые следует учитывать в каждой из этих областей, чтобы помочь вам ответить на вопрос: «Сколько лошадиных сил мне нужно для моей лодки?»
Ограничения производителяПроще всего начать с таблички грузоподъемности лодки или руководства пользователя.Помимо максимальной вместимости пассажиров и груза, производитель также указывает абсолютную максимальную мощность лодки в лошадиных силах. Если у вас есть лодка, которая была построена до 1972 года, прибыла из-за границы или была построена самостоятельно, у вас может не быть таблички вместимости, но руководства по эксплуатации лодки часто доступны в Интернете. Если нет, вы всегда можете связаться с производителем лодки, чтобы узнать об их ограничениях и рекомендации для вашей конкретной модели лодки.
Отношение мощности лодки к массеКогда вы пытаетесь определить необходимую мощность в лошадиных силах, важно учитывать вес лодки.Отношение мощности лодки к массе легко вычислить и можно выразить в лошадиных силах на фунт или фунтах на лошадиную силу.
Допустим, ваша лодка весит 5 000 фунтов и имеет двигатель мощностью 300 лошадиных сил. Разделив 5000 на 300, вы получите 16,6 фунтов на каждую лошадиную силу. Выполнение противоположных расчетов — деление 300 на 5000 — даст результат 0,06 лошадиных сил на фунт. Чем меньше число, тем быстрее будет ваше судно. Помните о соотношении мощности лодки к весу, если вы определились с мощностью и подобрали подвесной двигатель к размеру лодки.Хотя один или два подвесных двигателя могут дать вам одинаковый результат в лошадиных силах, имейте в виду, что дополнительный вес будет сопровождать каждый дополнительный подвесной двигатель.
Эффективность использования топливаКоличество лошадиных сил, которое вы выберете, повлияет на вашу топливную экономичность. Однако наличие более мощного двигателя не обязательно означает, что вы собираетесь использовать больше топлива. Согласно журналу Boating , работа вашего бензинового двигателя между 3000 и 3500 об / мин и вашего дизельного двигателя на 3/4 дроссельной заслонки — это лучшее место для экономии топлива.Если вы все время используете двигатель меньшей мощности на полном газу, он будет использовать больше газа, чем более мощный двигатель с меньшим открытием дроссельной заслонки. Помните об этом, когда будете думать, какую мощность выбрать.
Для тех, кто предпочитает точные вычисления, журнал Boating предоставил некоторые расчеты, которые можно использовать для вычисления некоторых чисел. Вы будете рассчитывать количество галлонов топлива, сжигаемых в час (GPH). Для этого нужно знать, что бензин весит примерно 6 кг.1 фунт на галлон, в то время как дизельное топливо весит около 7,2 фунта на галлон. Вам также необходимо знать, что хорошо обслуживаемый четырехтактный бензиновый двигатель, по оценкам, сжигает около 0,5 фунта топлива на одну лошадиную силу в час, в то время как аналогичный дизельный двигатель, по оценкам, сжигает 0,4 фунта топлива в час.
Уравнение: GPH = (удельный расход топлива x л.с.) / удельный вес топлива. Например, если вы хотите определить расход топлива для бензинового двигателя мощностью 300 лошадиных сил, вы должны вычислить (0,50 x 300) / 6.1, что дает результат 24,5 галлона в час.
Использование лодкиКак и в большинстве решений, связанных с катанием на лодках, использование лодки всегда является важным фактором. Вы используете лодку только для круиза с друзьями и семьей? Или вы будете катать на водных лыжах, вейкбордах и клубнях? Добавление того, чтобы тянуть кого-то за лодкой — и дополнительный вес для хранения принадлежностей для водных видов спорта — увеличивает потребность в мощности и часто является причиной рассмотреть вопрос о добавлении лошадиных сил к вашей лодке.
Кол-во человекПосле того, как вы подумали об использовании лодки, следующий вопрос, который следует задать, — каково нормальное количество пассажиров на вашей лодке. Если это обычно только вы и друг или супруг, этот вес отличается от веса, если вам нравится кататься на лодке с несколькими членами семьи и друзьями.
Практическое правилоЕсли вы относитесь к тому типу людей, которым не нужны точные расчеты — или вы просто не хотите с ними возиться, — блог Boat Trader предлагает практическое правило, которое можно использовать при определении количества лошадиных сил для вашей лодки.Эмпирическое правило основано только на весе и гласит, что вы должны иметь от 40 до 25 фунтов веса на каждую лошадиную силу.
Например, лодка весом 5000 фунтов может иметь двигатель мощностью от 125 до 200 лошадиных сил. Да, ассортимент широкий, но это потому, что лодки имеют множество различных конструкций и по-разному управляются. Хотя это эмпирическое правило может быть полезным способом получить приблизительную дальность полета, оно все же требует некоторых догадок, когда дело касается управляемости вашей лодки.
Федеральные правилаЯвляется незаконным перегонять лодку? Согласно федеральному правительству, да. Есть несколько разных способов определить подавление лодки. Раздел о мощности в лошадиных силах Свода федеральных правил содержит определение превосходящей силы лодки.
Существует два различных способа, которыми федеральное правительство определяет максимальную мощность для каждой конкретной лодки: один — это вычисление, а другой — проверка производительности.Способ использования зависит от лодки. Для большинства лучше всего использовать метод вычислений. Вы умножаете длину своей лодки на ширину транца. Затем вы берете это число, известное как «коэффициент», и сопоставляете его с мощностью в лошадиных силах в соответствии с таблицей 183.53 Свода федеральных правил — Мощность подвесного катера в лошадиных силах, показанной ниже.
Не забудьте настроить результат в зависимости от удаленного рулевого управления, высоты транца и днища лодки.
| Если коэффициент (ближайшее целое число) равен | 0-35 | 36-39 | 40-42 | 43-45 | 46-52 |
|---|---|---|---|---|---|
| Мощность в лошадиных силах составляет | 3 | 5 | 7.5 | 10 | 15 |
Примечание: для лодок с плоским дном и жесткой скулой с коэффициентом 52 или меньше уменьшите один предел вместимости (например, с 5 до 3)
| Если коэффициент больше 52,5 и лодка имеет | Дистанционное управление и высоту транца не менее 20 дюймов | Нет дистанционного управления или высота транца менее 20 дюймов | |
|---|---|---|---|
| Для лодок с плоским дном и жесткой скулой | Для других лодок | ||
| Мощность в лошадиных силах равна (возвести до ближайшего кратного 5) | (2-кратный коэффициент) −90 | (0.5 x фактор) −15 | (0,8 x фактор) −25 |
Метод испытания производительности предназначен для лодок длиной не более 13 футов, с дистанционным управлением колесами, максимальной вместимостью не более двух человек и высотой транца не менее 19 дюймов или не менее 19 дюймов. -дюймовая высота моторного отсека и высота транца не менее 15 дюймов. С помощью этого метода есть очень конкретные инструкции по подготовке лодки, касающиеся всего, от крепления двигателя до топливных баков, чтобы обеспечить единообразие.Существуют также конкретные инструкции для условий, в которых вы можете выполнить этот тест.
Первая часть теста производительности — тест быстрого поворота. Установив дроссельную заслонку на низкую скорость маневрирования и повернув ее прямо вперед, вы затем за полсекунды или меньше поверните колесо на 180 градусов и удерживайте его в этом положении. Если вы можете выполнить поворот на 90 градусов, не теряя управления лодкой и не уменьшая дроссельной заслонки, ваша лодка прошла испытание. Повторяйте, увеличивая скорость поворота до тех пор, пока вы не перестанете проходить испытание или не достигнете максимального газа.Максимальная мощность, которую лодка может использовать при прохождении этого теста, определяется как максимальная мощность в лошадиных силах, если она не превышает 40 лошадиных сил, и в этом случае максимальная мощность ограничивается 40.
Хорошая новость в том, что эти правила действуют для производителей лодок, поэтому, если производитель вашей лодки соблюдает федеральные правила, вы можете считать, что максимальная мощность, указанная на вашей лодке, соответствует федеральным нормам в отношении максимальной мощности в лошадиных силах.
СтрахованиеКоличество лошадиных сил вашей лодки будет влиять на вашу страховку лодки, и это еще один факт, который следует учитывать. Существует три основных области страхования, на которые влияет количество лошадиных сил, которое вы выбираете для своей лодки: общее страховое покрытие, стоимость страховых взносов и тип полиса.
Общий охватТакже существует вероятность, что ваша страховая компания не покроет судно, мощность которого превышает максимальную мощность производителя лодки.Это чрезвычайно важный фактор, так как он может повлиять на вашу способность получить страховое покрытие для вашей лодки. Если ваша лодка в настоящее время застрахована и вы рассматриваете возможность модернизации двигателя, убедитесь, что вы знаете правила вашей страховой компании в отношении ограничения мощности. Если вы обновитесь, не соблюдая эти правила и не уведомив свою страховую компанию, велика вероятность, что они не покроют ни одну поданную вами претензию.
Стоимость премииСоблюдая правила вашей страховой компании в отношении лошадиных сил, важно помнить, что это не означает, что изменение количества лошадиных сил не повлечет за собой изменения ваших страховых взносов.Как правило, покрывать лодки с большей мощностью будет дороже.
Тип политикиВ дополнение к учету исключительно мощности лодки, общий размер судна с учетом мощности может определять тип страхового полиса лодки, который вам необходимо получить. Например, страховой полис вашего домовладельца или арендатора обычно покрывает меньшие моторные лодки с мощностью менее 25 лошадиных сил. Лодки, которые больше и имеют мощность более 25 миль в час, почти всегда требуют отдельного страхового полиса.
Опасности, связанные с перегрузкой вашей лодкиБольше и быстрее не всегда лучше. Увеличение мощности за вашей лодкой может показаться невинным способом добавить немного волнения к вашему плаванию, но это может стоить вам значительной суммы денег в виде штрафов, судебных исков и повреждения вашей лодки. Вот несколько примеров того, как жажда скорости может вызвать у вас проблемы, когда дело касается максимальной мощности лодки.
Нарушение законаЯвляется незаконным перегонять лодку? В некоторых случаях да.Существуют федеральные законы, гарантирующие, что соответствующие ограничения мощности указаны на всех лодках. Государственные и местные законы, касающиеся превышения мощности вашей лодки, различаются. Убедитесь, что вы знаете законы штата и местные законы, в которых вы собираетесь кататься на лодке. В противном случае излишняя мощность может подвергнуть вас риску штрафов и других последствий.
Иски о несчастных случаяхДаже если законы вашего штата и местные законы не регулируют чрезмерную мощность вашей лодки, вы все равно подвергаете себя риску другими способами.Если вы попали в аварию, то факт, что мощность вашей лодки превышает рекомендации производителя, будет отражен в отчете об аварии. Хотя на вас могут не налагаться штрафы из-за нарушения государственных или местных законов, вы очень подвержены тому, что вас сочтут небрежным и станут жертвой судебного процесса, особенно в случае нанесения ущерба.
Слишком большой весВ последние годы увеличение мощности не всегда означало больший вес. Однако в некоторых случаях это все еще верно, и этот дополнительный вес является еще одним компонентом высокой мощности, который может быть опасным.Например, дополнительный вес может сделать самоосушающуюся кабину бесполезной, что приведет к проблемам с затоплением.
Повреждения лодкиДаже с дополнительной мощностью, которая не увеличивает вес лодки, дополнительная скорость оказывает давление, которое может нанести значительный ущерб вашей лодке. Каждая часть вашей лодки, от транца до носа, была создана, чтобы выдерживать определенное давление и напряжение. Если вы решите проигнорировать максимальную мощность лодки и превзойти ее, вы подвергнете каждую часть своей лодки давлению сверх того, на что она рассчитана, и рискуете серьезно повредить корпус лодки.
В поисках лодки с идеальным балансомКак производитель лодок, компания Formula Boats знает баланс между предоставлением вам мощности и скорости, которые вы хотите, при этом безопасность является приоритетом. Если вы подумываете о покупке лодки, наш онлайн-конструктор лодок дает вам возможность полностью настроить несколько различных моделей лодок с несколькими вариантами мощности. Вы можете быть уверены, что параметры мощности в лошадиных силах для каждой модели лодки, которую мы предоставляем, находятся в пределах, которые, по нашему мнению, позволяют максимально увеличить производительность при сохранении безопасности.
Откройте для себя понравившуюся лодку через нашего судостроителя? У нас есть дилеры по всей стране, готовые помочь вам найти вашу лодку. Начните с поиска ближайшего к вам дилера на нашем веб-сайте.
Несмотря на то, что мы сужаем список вариантов, все же может быть сложно выбрать количество лошадиных сил, которое обеспечит вам производительность, в зависимости от веса и использования лодки, а также топливной эффективности. Если вас интересует одна из наших моделей лодок, но вы все еще не знаете, сколько лошадиных сил вам нужно, мы готовы помочь — не стесняйтесь обращаться к нам.
Устойчивость и маневренность наземных позвоночных1 | Интегративная и сравнительная биология
Абстрактные
Чтобы стоящее животное было статически устойчивым, вертикальная линия, проходящая через его центр масс, должна проходить через многоугольник опоры, определяемый его лапами. Статически стабильная походка возможна для четвероногих, но, похоже, не используется. Физические и математические модели показали, что двуногая походка может быть динамически стабильной. Ускорение и замедление животных может быть ограничено силой мышц, коэффициентом трения о землю или соображениями устойчивости.Точно так же способность преодолевать повороты может быть ограничена прочностью или коэффициентом трения. Возможно, будет быстрее использовать более длинный маршрут с углами большего радиуса, чем более короткий маршрут с более острыми углами.
СТАТИЧЕСКАЯ УСТОЙЧИВОСТЬ
Тело находится в равновесии, если силы, действующие на него, уравновешены, и в этом случае оно будет неподвижным или будет двигаться с постоянной скоростью и угловой скоростью. Равновесие устойчиво, если оно возвращается в исходное состояние после небольшого смещения.Например, если я наклоняю и отпускаю стол, он возвращается в исходное положение на полу. Условием устойчивости конструкции, стоящей на земле, является то, что вертикальная линия, проходящая через ее центр масс, должна попадать в многоугольник, образованный точками опоры на земле. В случае стола это прямоугольник (или треугольник в случае трехногого стола), углы которого являются ножками стола. Три — это минимальное количество точечных опор, необходимых для устойчивости, но двуногий может устойчиво стоять на двух или даже на одной ноге, потому что каждая ступня касается земли на конечной площади, что эквивалентно распределению точек опоры.
Если стол расположен на слишком крутом склоне, вертикальная линия, проходящая через его центр масс, будет смещена за пределы многоугольника опоры, и стол перевернется. До того, как это произойдет, широкий стол можно наклонить на больший угол, чем узкий такой же высоты. Таким образом, допустимый угол смещения зависит от отношения размеров опорного треугольника к высоте центра масс над землей. Млекопитающее, такое как лошадь, которое стоит, поставив левую и правую ноги близко друг к другу, должно гораздо точнее контролировать поперечные движения своего центра масс, чем рептилия, такая как черепаха, которая стоит далеко друг от друга.Двуногие с маленькой ступней также должны сохранять смещения в узких пределах. Незначительные движения стоящих людей из-за непроизвольного раскачивания тела отслеживались в экспериментах, в которых испытуемые стояли на силовых пластинах. Харрис и др. (1982) обнаружил, что точка пересечения с землей вертикальной линии, проходящей через центр масс стоящего взрослого человека, обычно остается в пределах круга диаметром около 25 мм (или немного больше для пожилых людей). Таким образом, нам не составляет труда удерживать его в пределах многоугольника опоры между ступнями.Александер (1971) утверждал, что очень маленькие животные более восприимчивы к смещению порывами ветра, чем большие, поэтому животным размером с насекомые, возможно, придется стоять, широко расставив ноги (хотя эту проблему можно решить с помощью клея. ноги). Кроме того, находящимся в воде ходячим людям, например крабам, может потребоваться хорошо расставить ноги из-за опасности опрокидывания при движении воды (Martinez, 2001).
Нашнер и Вуллакотт (1979) исследовали реакцию людей на неожиданные смещения, когда их ставили на пару силовых пластин, по одной ноге на каждой пластине, и внезапно перемещая одну пластину вверх или вниз.Двумя возможными эффективными ответами были бы сгибание колена на стороне более высокой ступни или приведение одной ноги и отведение другой. Результаты эксперимента показали, что обычно использовался первый ответ. Papantoniou et al. (1999) отмечают, что для животных, которые стоят, поставив левую и правую ступни близко друг к другу, а колени не слишком прямые, это вариант, требующий меньшего углового движения суставов. Однако люди стоят с более прямыми коленями, чем любое животное.
Четвероногий может быть устойчивым, стоя на земле всего тремя ногами. Двигая ногами по очереди, он может сохранять статическую стабильность на протяжении всего цикла походки. Однако порядок движения ступней должен быть выбран таким образом, чтобы вертикальная линия, проходящая через центр масс, всегда находилась в пределах треугольника опоры. Варианты зависят от коэффициента заполнения — доли продолжительности шага, при которой каждая ступня находится на земле. Условие, что на земле всегда должно быть не менее трех футов, подразумевает, что для статической устойчивой ходьбы требуется коэффициент заполнения не менее 0.75. МакГи и Франк (1968) показали, что для коэффициентов нагрузки в диапазоне от 0,75 до 0,83 только одна последовательность движений ног соответствует статической устойчивости. Они назвали статически стабильную походку, использующую эту последовательность, регулярным сканированием. Последовательность левая передняя, правая задняя, правая передняя, левая задняя и т. Д. Это последовательность, обычно используемая ходячими млекопитающими (Hildebrand, 1976). Коэффициенты заполнения выше 0,83 допускают две другие последовательности, но даже при этих высоких коэффициентах загрузки регулярное сканирование дает больший запас устойчивости (то есть позволяет удерживать центр масс дальше от краев опорного треугольника). .
Несмотря на это теоретическое преимущество, животные редко или вообще используют регулярное ползание. Коэффициент заполнения 0,75 или более был зарегистрирован для жаб, черепах и (при очень низких скоростях) бегемота, но обычно не используется другими животными (Barclay, 1946; Walker, 1971; Hildebrand, 1976). И жабы, и черепахи на каком-то этапе своего пути отрываются от земли более чем на один фут.
Александр (1981) рассматривал животное, идущее с частотой шагов f, , так что продолжительность каждого шага составляла 1/ f. Если бы животное в это время упало свободно, начиная с состояния покоя, оно упало бы на расстояние g /2 f 2 . Если бы его ноги имели длину h, , то расстояние, на которое он мог упасть до удара о землю, было бы немногим меньше h. Таким образом, безразмерный параметр g /2 f 2 h может использоваться как мера потребности животного в поддержании равновесия при ходьбе. Этот параметр высок для животных с короткими ногами, медленно передвигающихся.Это 1 или меньше для собаки, бегущей галопом, около 5 для собаки, идущей очень медленно, и около 200 для черепах, таких как Geoemyda , идущих с нормальной (очень медленной) скоростью. Это означает, что собаки и другие млекопитающие могут терпеть гораздо большие отклонения от равновесия, чем черепахи.
Джейс и Александр (1980) спросили, почему, несмотря на их очевидную потребность в сохранении малых отклонений от равновесия, черепахи и черепахи используют походку, при которой иногда только две ноги находятся на земле.Они указали, что животное, использующее регулярное ползание, сохраняя равновесие на протяжении всего шага, должно будет прикладывать силы к земле, как показано на рисунке 1а. Обратите внимание, что большие мгновенные изменения силы потребуются всякий раз, когда ступня поднимается или опускается. У этих животных очень медленные мускулы, неспособные резко менять силу, которые (по-видимому, из-за их медлительности) работают очень эффективно (Woledge, 1968). Александер и Джейс (1980) представили математическую модель ходьбы черепахи, в которой медлительность мускулов была выражена требованием к ногам прикладывать силы, которые поднимались и опускались, как полупериод косинусоидальной кривой.Они варьировали время, в которое ступни ставились, и рассчитывали амплитуды нежелательных смещений (тангажа, крена и вертикальных перемещений). Они обнаружили, что нежелательные смещения были минимизированы с помощью походки, представленной на Рисунке 1b, при котором противоположные по диагонали ступни движутся вместе, а иногда на земле находятся только две ступни. Затем они позволили сделать мышцы немного более быстрыми, добавив синусоидальный член к косинусному, что позволило искажать структуру силы. Затем нежелательные смещения были сведены к минимуму с помощью походки, показанной на рисунке 1c, в которой диагонально противоположные ступни немного сдвигаются по фазе друг с другом, и снова бывают случаи, когда только две ступни находятся на земле.Рисунок 1c очень похож на записи ходьбы черепах, как по относительным фазам ступней, так и по наклонным формам графиков зависимости силы от времени.
ДИНАМИЧЕСКАЯ УСТОЙЧИВОСТЬ
В статически устойчивой походке силы, действующие на шагающего, находятся в равновесии на всех этапах шага. Походка, для которой это неверно, может, тем не менее, быть динамически стабильной в том смысле, что ходунок автоматически возвращается к своему нормальному режиму движения после нарушения.Динамическая стабильность может быть обеспечена за счет управления с обратной связью, то есть за счет системы управления, которая обнаруживает нежелательные движения и принимает меры для их исправления. Например, одноногий прыгающий робот Райберта был стабилизирован с помощью управления с обратной связью. Райберт (1986) воспроизвел записи того, как этого робота беспокоил резкий толчок, когда он прыгал на месте. Он вернулся в желаемое положение в течение нескольких секунд.
МакГир (1990, , , 1993) исследовал интересную возможность того, что система пассивной ходьбы может быть динамически стабильной.Он начал с рассмотрения традиционной деревянной игрушки, которая пассивно спускается по склону, раскачиваясь из стороны в сторону. Он спроектировал и построил плоскую некачающуюся версию этой игрушки. Он провел с ним эксперименты и математически проанализировал его движение и показал, что его движение было стабильным во всем диапазоне скоростей. Куо (1999) распространил анализ на трехмерный случай, когда перекатывание возможно. Он показал, что модель неустойчива по крену, но ее можно стабилизировать с помощью нескольких альтернативных систем управления с обратной связью.Он утверждал, что контроль бокового положения стопы (ширины шага) будет особенно благоприятным механизмом. Бауби и Куо (2000) экспериментально подтвердили, что ходящие люди таким образом контролируют перекатывание.
МакГир (1990 b ) представил математическую модель бега на двуногих ногах с телескопическими ногами, содержащими пружины. Модель будет двигаться пассивно под уклон, и ее можно будет стабилизировать, сделав достаточно высокую частоту шага, но МакГир утверждал, что активная стабилизация желательна.
УСКОРЕНИЕ И ЗАМЕДЛЕНИЕ
Ускорение и замедление являются важными компонентами маневренности, но по ходьбе или бегу доступно очень мало данных. Спринтеры покидают стартовые блоки с ускорением около 10 м / сек. 2 (Ballreich and Kuhlow, 1986). Elliott et al. (1977) заснял охоту на львов в Восточной Африке и рассчитал уравнения, описывающие движения как львов, так и их добычи. Эти уравнения подразумевают, как и следовало ожидать, что ускорение снижалось во время пробега по мере увеличения скорости.По ним можно рассчитать, что начальные ускорения животных, начиная с состояния покоя, составили 9,5 м / с 2 для львов, но только 5,0, 5,6 и 4,5 м / с 2 , соответственно, для зебры, гну. и газель Томсона.
Для высоких ускорений и замедлений требуются большие усилия, поэтому они могут быть ограничены силой мускулов. В качестве альтернативы они могут быть ограничены трением о землю или проблемой устойчивости. Вертикальная сила, прикладываемая к земле животным массой м, , усредненная за полный шаг, должна составлять в среднем мг, , где г, — ускорение свободного падения.Если животное ускоряется с ускорением a, , горизонтальная составляющая силы на земле должна составлять в среднем мА. Таким образом, чтобы ускорение было возможным, эффективный коэффициент трения ступней о землю должен быть не менее a / g. Я использую прилагательное «эффективный», чтобы указать на возможность того, что стопа на земле может быть усилена средствами, не являющимися строго фрикционными, такими как кроссовки с шипами, когти или неровности земли.Нигг (1986) сообщает об измерениях коэффициентов трения спортивной обуви о искусственные поверхности. Коэффициенты варьировались от примерно 0,3 для поверхности, покрытой рыхлыми гранулами, до примерно 1,5 для искусственной травы. Картмилл (1979) измерял коэффициенты трения стоп просимиевых приматов о доску, наклоняя доску и наблюдая за углом, под которым они начали скользить. Большинство коэффициентов лежат между 1 и 2. Когда босые люди тестировались таким же образом, большинство коэффициентов лежало между 0.5 и 1.0.
Проблема устойчивости, которая может ограничивать ускорение и замедление, проиллюстрирована на рисунке 2a. Автомобиль имеет массу м и ускорение a, , поэтому его вес составляет мг ( г, — ускорение свободного падения), а горизонтальная составляющая силы, действующей на колеса, составляет мА. Длина колесной базы составляет L, и центр масс находится на расстоянии х перед точками контакта задних колес с землей, на высоте х от земли.Вертикальные составляющие сил на колеса равны F, для передних колес и ( мг, — F ) для задних колес. Принимая во внимание точки контакта задних колес с землей\ [\ mathit {FL} \ {+} \ \ mathit {mah} \ {-} \ \ mathit {mgs} \ {=} \ 0 \ \]
Таким образом, F должен упасть, когда будет увеличиваться . Условие положительного значения F :\ [\ mathit {a} \ {<} \ \ mathit {gs} / \ mathit {h} \ \]
Сила F не может быть отрицательной, потому что шины не придерживайтесь дороги.Если будет предпринята попытка ускорения, превышающего предел, установленный условием 2, передние колеса отойдут от дороги, и транспортное средство выполнит сальто назад. Аналогичное условие касается замедления. Если абсолютное значение замедления больше g ( L — s ) / ч, задние колеса уйдут с дороги. Хорошо известно, что велосипедист, который слишком сильно тормозит, будет брошен через руль. Автомобили спроектированы с достаточно низким центром масс, чтобы избежать этой опасности.Тот же принцип применяется к ножным животным. Ли и др. (1999) показал, что доля веса тела, поддерживаемая передними лапами бегущих рысью собак, увеличивается, когда они замедляются, и падает, когда они ускоряются. Однако условия стабильного разгона и замедления у четвероногого автомобиля сложнее, чем у колесного. Если игнорировать небольшие движения, допускаемые подвеской транспортного средства, точка контакта колеса с землей находится в фиксированном положении относительно центра масс.Напротив, ноги животного движутся назад относительно центра масс, когда они находятся на земле. При этом s и ( L — s ) изменяются в ходе шага. Четвероногий может увеличить эффективное значение с для ускорения, задерживая проявление пикового усилия до конца шага, когда задняя ступня находится далеко позади тазобедренного сустава. Это может увеличить эффективное значение ( L — s ) во время замедления за счет приложения максимальной силы в начале шага, когда передняя нога находится перед плечом.В экспериментах на собаках такое приспособление оказалось менее важным, чем перераспределение веса между передними и задними лапами.
Люди и другие двуногие должны наклоняться вперед при ускорении и назад при замедлении.
УГОЛ
У животного, бегущего по изогнутой траектории, есть ускорение к центру кривизны, перпендикулярно его траектории. Более конкретно, животное, бегущее со скоростью v по пути радиусом r , имеет поперечное ускорение v 2 / r. Если его масса составляет м, требуется поперечная сила mv 2 / r , чтобы придать ему такое ускорение. На рис. 2b показан вид спереди автомобиля, повернутого влево от диаграммы. Центр масс находится посередине между левым и правым колесами, которые находятся на расстоянии х друг от друга. Вертикальные составляющие силы F, ‘и ( мг, — F ‘) действуют на колеса внутри и снаружи изгиба соответственно.{2} / \ mathit {r} \ {<} \ \ mathit {gw} / 2 \ mathit {h} \ \] Если поворот с большим поперечным ускорением v 2 / r , чем это будет предпринята попытка, автомобиль перевернется. Автомобили спроектированы с низким центром масс, чтобы этого не происходило.Животные могут исключить опасность опрокидывания на повороте, наклонившись к нему. Животные с низким отношением ширины дорожки к высоте центра масс (эквивалент отношения w / h ) должны опираться даже на довольно пологие повороты.Так обстоит дело с большинством крупных млекопитающих. Например, следы лошадей показывают, что ширина проезжей части составляет всего 10–20% от расчетной высоты центра масс. В крайнем случае, если бы ширина следа была равна нулю (левая и правая лапы были поставлены вдоль одной линии), животному пришлось бы наклоняться под углом arctan ( v 2 / rg ), чтобы по вертикали. Велосипедисты, совершающие повороты, также должны наклоняться под этим углом.
Александр (1982) предположил, что способность бегающих животных преодолевать повороты может быть ограничена опасностью заноса.{2} / \ mathit {rg} \ \] Грин (1985), который исследовал способность бегунов-людей бегать по кругу, выдвинул альтернативное предположение, что прохождение поворотов может быть ограничено способностью опорно-двигательного аппарата генерировать необходимые силы. Рассмотрим спортсмена массой м , бегущего с максимальной скоростью (со скоростью v ) по кривой радиусом r. Пусть продолжительность полушага будет T (это время от постановки одной ноги до постановки другой).Пусть длина шага будет l (это расстояние, пройденное ногой на земле). Сделайте правдоподобное, но неопределенное предположение, что T и l оба постоянны. Пусть средние вертикальные и горизонтальные составляющие силы , когда ступня находится на земле , равны F v , F h соответственно. Средние значения этих составляющих силы для полного полушага составляют мг, mv 2 / r. Нога находится на земле в течение времени l / v вне продолжительности полушага T. Следовательно, максимальная скорость спортсмена при беге по прямой составляет v 0 , и на этой скорости сила на ногах составляет мгТв 0 / л. {2} \ \] Автор подставив 6 и 7 в 8 и переставив так, чтобы обе части уравнения были безразмерными. На рисунке 3 показаны графики зависимости максимальной скорости от радиуса, рассчитанные как из уравнения 9 (принимая v 0 = 8 м / с), так и из уравнения 5 ( принимая μ = 0.6). Он также показывает эмпирические данные для человека, бегущего по траве в шипованной обуви. Уравнение 9 хорошо соответствует данным для больших радиусов, но когда радиус мал, уравнение 5 дает лучшее соответствие. То же самое и для бегунов по бетону (рис. 2b, Greene, 1985). Одна из возможных гипотез состоит в том, что скорость на поворотах может быть ограничена способностью прилагать необходимые силы, если радиус большой; и трением, если радиус небольшой. Для проверки этой гипотезы потребуются эксперименты с поверхностями, дающими разные коэффициенты трения.Гонки на бочках — это спорт, в котором проверяется способность лошадей преодолевать повороты. Участники должны проехать как можно быстрее по трассе, огибающей нефтяные бочки, расположенные на расстоянии около 30 м друг от друга. На фотографиях показаны лошади, наклоняющиеся под углом примерно 45 ° к вертикали, когда они огибают бочки, предполагая, что их поперечные ускорения должны быть примерно равны ускорению свободного падения, а коэффициент трения о землю должен быть не менее 1,0.
Простая модель, предложенная гонками на бочках, поможет прояснить принципы быстрого маневрирования.Предположим, что необходимо многократно и с максимально возможной скоростью объехать круг, обозначенный двумя бочками на расстоянии 2 с друг от друга (рис. 4). Будем считать, что выбранный путь состоит из двух полукругов радиусом ps , соединенных двумя прямыми отрезками длиной 2 s (1 — p ). Скорость на поворотах постоянная и максимально возможная для кривой с таким радиусом. На прямых участник первой половины дистанции ускоряется с ускорением и , а во второй половине замедляется с ускорением — и .Предположение о постоянном ускорении подразумевает, что дистанция слишком коротка для участника, чтобы достичь максимальной скорости, которая может быть достигнута в более длинном прямом спринте. {1/2} \ \]
Животное входит на каждую прямую со скоростью ( апс, ) 1/2 и ускоряется с ускорением — на первой половине прямой. , расстояние с (1 — п ).Время, необходимое для преодоления этого расстояния, t ускорение , можно рассчитать из стандартного уравнения для постоянного ускорения. Решение этого квадратного уравнения: Неоднозначный знак должен быть положительным, чтобы время было положительным. Равное время необходимо для второй половины каждой прямой, когда животное замедляется. Общее время T , необходимое для одного круга трассы, равно: Мы хотим найти значение p , которое минимизирует T. Это ноль, когда p = 0,49; Ожидается, что оптимальный радиус поворотов будет составлять почти четверть расстояния между стойками. Следует подчеркнуть, что одно из предположений, от которых зависит этот вывод, заключается в том, что расстояние между столбами небольшое.Поперечная сила, приложенная к центру масс, достаточна для того, чтобы движущееся транспортное средство или животное двигалось по кривой, но момент относительно центра масс необходим, когда начинается поворот, чтобы придать ему угловую скорость, необходимую для удержания его лицом по направлению движения.В автомобилях это делается путем поворота передних колес таким образом, чтобы они больше не совпадали с начальным направлением движения; возникающая поперечная сила на передние колеса обеспечивает необходимый момент.
Стабильность прохождения поворотов — важный фактор в конструкции автомобиля (см., Например, Ellis, 1994). Ключевыми понятиями являются избыточная и недостаточная поворачиваемость. Поскольку скорость увеличивается на повороте с постоянным радиусом, угол поворота рулевого колеса должен быть уменьшен для автомобиля с избыточной управляемостью и увеличен для автомобиля с недостаточной управляемостью.Эти регулировки рулевого управления необходимы, потому что поперечная сила, действующая на колесо, заставляет его скользить боком по земле, когда оно катится вперед. Автомобили с недостаточной управляемостью устойчивы в поворотах на всех скоростях; то есть транспортное средство имеет тенденцию возвращаться к своему первоначальному радиусу поворота после возмущения (например) порывом ветра или неровностями дорожного покрытия. Однако при превышении критической скорости автомобили с избыточной поворачиваемостью становятся нестабильными. Похоже, мы недостаточно знаем об обращении животных, чтобы установить, может ли какое-либо аналогичное явление сделать управление животными нестабильным.Однако стоит отметить, что автомобиль, управляемый передними колесами, с меньшей вероятностью будет чрезмерно поворачиваться, если его центр масс находится далеко вперед, так что большая часть веса тела приходится на передние колеса. На передние ноги четвероногих млекопитающих обычно приходится около 60% веса тела (Alexander and Jayes, 1983).
Наше понимание стабильности и маневренности наземных позвоночных разочаровывает по сравнению с нашими знаниями о других аспектах их передвижения. Особо необходимы дополнительные исследования динамической устойчивости при ходьбе и беге.В этой области была проделана отличная работа, но она была сосредоточена на двуногих роботах, которые передвигаются (более или менее) как люди, и мало внимания уделяла походке на четвероногих.
Рис. 1. Графики вертикальных составляющих сил на ступнях четвероногого животного в зависимости от времени для трех аллюров. (а) поддерживает равновесие на протяжении всего шага, (б) сводит к минимуму нежелательные смещения для животных с очень медленными мышцами, и (в) минимизирует нежелательные смещения для животных с немного более быстрыми мышцами.От Александра (1982)
Рис. 1. Графики вертикальных составляющих сил на ступнях четвероногого животного в зависимости от времени для трех аллюров. (а) поддерживает равновесие на протяжении всего шага, (б) сводит к минимуму нежелательные смещения для животных с очень медленными мышцами, и (в) минимизирует нежелательные смещения для животных с немного более быстрыми мышцами. От Александра (1982)
Рис. 2. Диаграммы, показывающие силы, действующие на транспортное средство (а) при ускорении и (б) при повороте влево от диаграммы.
Рис. 2. Диаграммы, показывающие силы, действующие на транспортное средство (а) при ускорении и (б) при повороте влево от диаграммы.
Рис. 3. Максимальные скорости, с которыми взрослый человек может бегать по кривым разного радиуса. Пунктирная линия показывает прогнозы из уравнения 5, принимая μ = 0,6; сплошная линия показывает прогнозы из уравнения 9 для субъекта, для которого v 0 = 8 м / с; а точками показаны наблюдаемые скорости из McMahon (1984) для того же объекта
Рис.3. Максимальные скорости, с которыми взрослые люди могут бегать по кривым разного радиуса. Пунктирная линия показывает прогнозы из уравнения 5, принимая μ = 0,6; сплошная линия показывает прогнозы из уравнения 9 для субъекта, для которого v 0 = 8 м / с; а точками показаны наблюдаемые скорости из McMahon (1984) для того же объекта
Рис. 4. Обход двух препятствий (закрашенные кружки). Модель, представленная в тексте, предсказывает радиус круглых сегментов, что минимизирует время работы
Рис.4. Обход двух препятствий (закрашенные кружки). Модель, представленная в тексте, предсказывает радиус круглых сегментов, что минимизирует время работы
Литература
Александр
,Р. МакН.
1971
. Размер и форма . Арнольд, Лондон.Александр
,Р. МакН.
1981
. Походки четвероногих: приспособления к устойчивости и экономии.Symp. Zool.Soc. Лондон
,48
269
-287.Александр
,Р. МакН.
1982
. Передвижение животных . Блэки, Глазго.Александр
,Р. МакН.
и А.С. Джейс.1983
. Гипотеза динамической устойчивости походки четвероногих млекопитающих.J. Zool
,201
:135
-152.Ballreich
,R.
и A. Kuhlow.1986
. Biomechanik der Leichtathletik . Энке, Штутгарт.Барклай
,О. Р.
1946
. Механика передвижения амфибии.J. Exp. Биол
,23
177
-203.Bauby
,C. E.
и A. D. Kuo.2000
. Активный контроль бокового баланса при ходьбе человека.J. Biomechan
,33
1433
-1440.Cartmill
,M.
1979
.Ладонная кожа приматов: ее фрикционные характеристики и их функциональное значение.г. J. Phys. Антрополь
,50
497
-510.Elliott
,J. P.
, I. McT. Коуэн и К. С. Холлинг.1977
. Поимка добычи африканским львом.банка. J. Zool
,55
1811
-1828.Эллис
,Дж. Р.
1994
. Динамика управляемости .Публикации по машиностроению, Лондон.Грин
,P. R.
1985
. Бег по ровным поворотам: эксперименты, теория, приложения.J. Biomech. Eng
,107
96
-103.Harris
,G. F.
, T. A. Knox, S. J. Larson, A. Sances и E. A. Millar.1982
. Метод отображения данных центра давления балансировочной платформы.Дж. Биомечан
,15
741
-745.Хильдебранд
,М.
1976
. Анализ походки четвероногих: общие соображения и симметричные походки. В Р. М. Херман, С. Грилнер, П. С. Г. Стейн и Д. Г. Стюарт (ред.), Нейронный контроль передвижения, стр. 203–236. Пленум, Нью-Йорк.Джейс
,A. S.
и R. McN. Александр.1980
. Походки челонианцев: техника ходьбы на очень низких скоростях.Дж. Зоол
,191
353
-378.Куо
,А. Д.
1999
. Стабилизация бокового движения при пассивной динамической ходьбе.Внутр. J. Robotics Res
,18
917
-930.Ли
,Д. В.
, Дж. Э. А. Бертрам и Р. Дж. Тодхантер.1999
. Ускорение и равновесие у собак, бегающих рысью.J. Exp. Биол
,202
3565
-3573.Мартинес
,М. М.
2001
.Бег в прибое: гидродинамика берегового краба Grapsus tenuicrustatus .J. Exp. Биол
,204
3097
-3112.МакГир
,Т.
1990
. Пассивная динамическая ходьба.Внутр. J. Robotics Res
,9
62
-82.МакГир
,Т.
1990
. Пассивный двуногий бег.Proc. Рой. Soc. В
,240
:107
-134.МакГир
,Т.
1993
. Динамика и контроль двуногого передвижения.J. Theor. Биол
,163
277
-314.МакГи
,Р. Б.
1968
. Об устойчивости ползучих походок четвероногих.Math. Биоски
,3
331
-351.МакМахон
,Т.А.
1984
. Мышцы, рефлексы и движение .Издательство Принстонского университета, Принстон, Нью-Джерси.Nashner
,L. M.
и M. Woollacott.1979
. Организация быстрых постуральных корректировок стоящих людей: экспериментально-концептуальная модель. In Р. Э. Талбот и Д. Р. Хамфри (ред.), Поза и движение, стр. 243–257. Raven Press, Нью-Йорк.Нигг
,Б. М.
1986
. Биомеханика кроссовок . Human Kinetics, Шампейн, Иллинойс.Papantoniou
,V.
, P. Avlakiotis, R. McN. Александр.1999
. Управление роботом-динозавром.Фил. Пер. Рой. Soc. В
,354
863
-868.Райберт
,М. Х.
1986
. Роботы с ножками, которые балансируют . MIT Press, Кембридж, Массачусетс.Уокер
,W. F.
1971
. Структурно-функциональный анализ ходьбы черепахи Chrysemys picta marginata .Дж. Морф
,134
195
-214.Woledge
,R. C.
1968
. Энергетика мышц черепахи.J. Physiol
,197
685
-707.Общество интегративной и сравнительной биологии
Влияние удлинения и формы хода на создание силы мембранного крыла в стиле летучей мыши
Abstract
Соотношение сторон (AR) — это один параметр, используемый для прогнозирования летных характеристик вида летучих мышей на основе формы крыла.Считается, что летучие мыши с высокими крыльями AR имеют превосходное соотношение подъемной силы и сопротивления, и поэтому прогнозируется, что они смогут летать быстрее или выдерживать более длительные полеты. Напротив, летучие мыши с более низкими крыльями AR обычно считаются более маневренными. Однако AR на половине размаха большинства крыльев летучих мышей попадают в узкий диапазон примерно 2,5–4,5. Кроме того, эти прогнозы не принимают во внимание широкие вариации взмахов рук, наблюдаемые у летучих мышей. Чтобы изучить влияние различных моделей гребков, мы измерили подъемную силу и сопротивление хорошо податливых мембранных крыльев с различными AR, относящимися к летучей мыши.Плечевой сустав с двумя степенями свободы позволял независимо управлять амплитудой взмахов и стреловидностью крыла. Мы протестировали пять моделей с одинаковыми вариациями рисунка гребков, частоты взмахов и скорости ветра. Наши результаты показывают, что в пределах относительно небольшого диапазона AR крыльев летучей мыши AR не оказывает явного влияния на генерацию силы. Напротив, создание подъемной силы нашей простой моделью в основном зависит от частоты взмахов крыльев, амплитуды махов и скорости набегающего потока; сопротивление больше всего зависит от амплитуды махов.
Ключевые слова: совместимые крылья, машущий полет, микровоздушные аппараты
1. Введение
Из-за размера летучих мышей и их возможностей, таких как парение, высокоманевренный полет и способность нести значительные грузы (матери летучих мышей несут их детенышей, пока они почти полностью не вырастут [1,2]), эти летающие животные служат источником вдохновения для создания микровоздушных транспортных средств с машущими крыльями (MAV).
Летучие мыши летают с податливыми перепончатыми крыльями, и эта особенность отличает их от птиц и насекомых со сравнительно жесткими крыльями.Насекомые контролируют свой ход крыльев на одном суставе у основания крыла, а их крылья пассивно крутятся за счет инерционных и аэродинамических сил [3]. Птицы имеют более активный контроль над формой крыльев и кинематикой взмаха. Например, совместное движение локтя и запястья приводит к втягиванию крыла [4], и перья могут быть раздвинуты, чтобы контролировать форму крыла и проницаемость для воздуха.
Управление движением и формой крыльев летучей мыши более сложное. Скелет включает всю верхнюю конечность и большую часть нижней конечности, а у некоторых видов — хвост.Некоторые суставы скелета движутся в функциональных группах, но для описания 95% общего движения крыла требуется более десятка независимых измерений [5]. В целом крылья летучей мыши обладают большей степенью свободы, чем крылья птиц или насекомых.
Поверхность крыла летучей мыши состоит из податливой мембраны [6]. Эта мембрана сложна; эластиновые волокна, встроенные в ориентацию преимущественно по размаху, вносят анизотропию, а мышцы, ориентированные в основном в хордовом направлении, активируются во время взмаха крыла и могут управлять изгибом крыла во время полета [7].
Подобно крыльям птиц и насекомых, крылья летучих мышей могут иметь различные формы и размеры. В течение нескольких десятилетий биологи делали выводы о поведении и эффективности полета на основе легко измеряемых параметров и связывали эти выводы с экологией полета (например, [8–10]). Такими параметрами являются, например, размах и площадь крыла, а также масса тела. В анализе основных компонентов формы крыла и размеров тела более чем 200 видов летучих мышей Норберг и Райнер предположили, что соотношение сторон (AR, размах крыльев / хорда крыла) и нагрузка на крыло (вес тела / площадь крыла) критически определяют поведение в полете [9 ].Они пришли к выводу, что летучие мыши с высокими крыльями AR с большей вероятностью летают на открытом воздухе, тогда как крылья с низким AR больше подходят для загроможденных мест обитания. Летучие мыши с низкой нагрузкой на крыло обычно летают медленнее, чем летучие мыши с высокой нагрузкой на крыло. Однако диапазон AR среди видов летучих мышей довольно ограничен по сравнению с полным разнообразием, обнаруженным у самолетов, птиц или насекомых (). Действительно, основываясь на выборке видов, опубликованной Norberg & Rayner [9], более двух третей видов летучих мышей имеют AR на половине размаха между 2.75 и 3,75. Виды семейства Molossidae или летучие мыши со свободным хвостом являются исключительными в этом распределении с AR примерно вдвое больше, чем у других видов летучих мышей.
Распределение соотношения сторон половинного пролета у 215 видов летучих мышей (данные Norberg & Rayner [9]). Распределение для всей выборки видов показано синим цветом. Vespertilionidae, вечерние летучие мыши ( n = 75) в зеленом цвете и летучие мыши Molossidae ( n = 17) в фиолетовом.
Идея о том, что поведение в полете может быть предсказано с помощью AR, основана на аэромеханике неподвижного крыла для высоких чисел Рейнольдса, в частности, вклада индуцированного сопротивления в общее сопротивление.Индуцированное сопротивление, D i , является неотъемлемым следствием подъемной силы и наличия концевых вихрей; по мере увеличения AR относительное влияние концевого вихря на общее производство лобового сопротивления уменьшается
1,1
где — коэффициент индуцированного сопротивления, C L коэффициент подъемной силы и e коэффициент полезного действия размаха крыла [11].
Для неподвижных крыльев эффективность имеет некоторую зависимость от AR [12–16]. След неподвижного крыла в установившемся потоке можно описать как систему подковообразных вихрей, в которой связанный вихрь вокруг аэродинамической поверхности и концевые вихри являются единственными заметными вихревыми структурами.Однако при машущем полете движение крыла во время цикла взмахов крыла и градиенты давления и скорости вдоль размаха крыла могут вызвать очень нестабильные условия обтекания. Ограниченная достоверность квазистационарных предположений для объяснения генерации силы при взмахах полета была впервые продемонстрирована более 30 лет назад [17]. Было идентифицировано несколько нестационарных аэродинамических эффектов, которые невозможно предсказать с помощью традиционной аэромеханики, таких как наличие устойчивых вихрей на передней кромке, взаимодействия крыла и следа и хлопанье-бросок [18–20].След от машущих крыльев значительно сложнее, чем от неподвижных крыльев в установившемся потоке, и на эффективность крыла влияют другие факторы, помимо индуцированного сопротивления концевых вихрей. Таким образом, AR может иметь меньшее влияние на генерацию силы и мощность полета, чем на характер колебательного движения. Хотя несколько экспериментальных исследований изучали хлопающие, хорошо податливые мембранные крылья, имеющиеся данные предполагают, что выработка силы и потребность в мощности сильно зависят от характера гребка [21,22].
Здесь мы исследуем относительную роль AR, частоты биений крыльев, амплитуды биений крыльев, угла стреловидности и отношения хода вниз на создание аэродинамической силы.Мы предполагаем, что кинематика гребка крыла сильнее влияет на общие характеристики крыла, чем AR. Мы проверяем эту идею с помощью робота-заслонки, использующего механические крылья с AR в диапазоне, соответствующем летучей мыши, 2,5
2. Материалы и методы
2.1. Модели
Принципиальная конструкция и приводной механизм нашего механического машущего крыла были взяты непосредственно из предыдущей работы [23], в которой полномасштабная модель аэродинамической трубы была спроектирована на основе геометрии крыла летучей мыши с собачьей мордой, Cynopterus brachyotis и изготовлены с использованием деталей с трехмерной печатью. Эта модель имела три степени свободы: взмахи (вверх-вниз), смахивание (вперед-назад) и складывание, и приводилась в действие с помощью двухтактных кабелей, которые соединяли каркасные суставы с серводвигателями, установленными за пределами испытательной секции аэродинамической трубы.
Мы упростили механику нашей модели, исключив складывание крыла и сохранив только два мотора, которые обеспечивают взмах и стреловидность крыла. Мы построили пять моделей, охватывающих вариацию формы крыла. Базовая модель AR3.5bl основана на размере и общей форме E. fuscus . Он имеет AR 3,5, полуразмах b = 13 см и площадь крыла S = 48 см 2 . Для облегчения сравнения и уменьшения возможных влияний на создание силы от других источников, таких как зубчатость задней кромки и сужение крыла, мы упростили геометрию формы крыла в плане.Крылья рук представляют собой прямоугольник, в котором перепонка проходит между телом и тем, что было бы пальцем V у летучей мыши. Мембрана поддерживается простым каркасом верхней части и предплечья. Крыло руки состоит из двух треугольников, состоящих из трех цифр ( a ). Мы использовали соотношение крыльев кисти к площади рук, равное 0,6, и соотношение крыльев кисти к размаху крыльев, равное 1,15, что характерно для E. fuscus [9]. Соотношение кисти к площади и размаху крыльев сохранено.
( a ) Протестирован скелет пяти крыльев.Базовая модель AR3.5bl показана посередине. Соотношение сторон моделей слева и справа варьируется путем изменения размаха крыла, b , при сохранении постоянной площади S . Соотношение сторон моделей ниже и выше изменяется за счет изменения площади крыла с сохранением постоянного размаха. Все крылья имеют встроенный угол атаки 6 ° и 9% развал на 1/4 хорды. ( b ) Вид крыла в сборе в перспективе. Плечевая часть вращалась вдоль длинной оси модели, чтобы обеспечить маховое движение, рука поворачивалась вокруг своей точки поворота в центре плечевой опоры, чтобы учесть развевающее движение.( c ) Вид сверху модели, иллюстрирующий движение поворота руки. ( d ) Вид модели сзади, иллюстрирующий маховое движение при вращении плеча.
AR для непрямоугольных крыльев обычно описывается как AR = b 2 / S . Таким образом, AR можно легко изменить, изменив площадь крыла, сохранив при этом размах крыльев постоянным. Локальные скорости по размаху крыльев, вводимые по размаху крыльев за счет взмахов, остаются постоянными для всех моделей данного размаха крыла.Как вариант, площадь крыла можно оставить постоянной, а размах крыльев изменить. Используя эти соображения, мы построили пять моделей с тремя AR 2.5, 3.5 и 4.5. Три модели имеют одинаковую площадь крыла, а три модели имеют одинаковый размах крыльев ( a ). Все пять крыльев имеют встроенный статический угол атаки α o = 6 ° и 9% изгиб на 1/4 хорды.
Каркасы крыльев были разработаны в SolidWorks ® 2012 x64 (Dassault Systèmes SOLIDWORKS Corp., Уолтем, Массачусетс, США) и с трехмерной печатью (Dimension 1200es, Stratasys, Eden Prairie, Миннесота, США) с использованием АБС-пластика (акрилонитрилбутадиенстирол). Мы нанесли покрытие суперклея (моментальный клей M60 Advanced Performance, Adhesive Systems Inc., Франкфорт, Иллинойс, США) на все пальцы, чтобы усилить их. Чтобы уменьшить нагрузку на мембрану, место прикрепления на теле было изменено по сравнению с предыдущими версиями клапана [23]. Мембрана приклеивалась к отростку плеча и повторяет вращение плеча во время махового движения ( b — d ).Наши мембраны были изготовлены из высокоэластичного силиконового каучука Dragon Skin ® (Smooth-On Inc., Macungie, PA, USA). Этот материал имеет заявленное значение твердомера по Шору-А, равное 10 (модуль Юнга около 0,7 МПа). Мы отрегулировали соотношение компонентов A: B до 3: 1, что позволило нам производить более тонкие мембраны.
Чтобы изготовить тонкую мембрану, мы вылили неотвержденную смесь на алюминиевую пластину с тефлоновым покрытием. Он был покрыт второй пластиной, которая была обработана смазкой для пресс-формы и утяжелена для общей нагрузки около 8 кг.Полученные мембраны имели толщину около 0,2 мм. Мембрана была приклеена непосредственно к каркасу и армирующим конструкциям силиконовой эпоксидной смолой (Silpoxy, Smooth-On, Inc., Истон, Пенсильвания, США) с крылом в нейтральном положении скольжения ( b ).
Мы укрепили весь передний край и задний край между пальцами тонкой резинкой 0,25 мм (швейная нить Stretchrite, Jo-Ann Stores, Inc.) [23]. Остальная часть задней кромки была усилена полосой мембраны из кожи дракона шириной 0,5 см, приклеенной к каркасу на задней кромке, и вторая полоса добавлена на расстоянии примерно 1 см дальше от задней кромки.Эти две полосы были приклеены так, чтобы крыло было максимально стреловидно.
Колебательные и развертки приводились в движение двумя бесщеточными серводвигателями со встроенными энкодерами (BE163CJ-NFON, Parker Hannfin Corp., Rohnert Park, CA, USA) и управлялись сервоконтроллером (Accelera DMC-4060, Galil Motion Control, Роклин, Калифорния, США) со встроенными усилителями (AMP-43040, Galil Motion Control). Сценарий Matlab преобразовал входные данные для частоты махов, угла амплитуды махов, угла развертки и отношения хода вниз к ходу вверх в команды PVT (положение, скорость и время), которые были отправлены на сервоконтроллер.
2.2. Экспериментальная установка
Изготовленная на заказ силовая пластина была установлена на панели пола испытательной секции аэродинамической трубы замкнутого цикла в Университете Брауна (размеры испытательной секции: 3,8 × 0,6 × 0,82 м 3 ). Силовая пластина представляет собой систему на основе изгиба, которая допускает независимое перемещение в двух перпендикулярных направлениях (оси подъема и сопротивления) центральной секции, которая служит опорой для экспериментальной модели. Стойка для установки двигателей и моделей была прикреплена к силовой пластине, позволяя крыльям выходить в испытательную секцию через пол аэродинамической трубы, при этом двигатели оставались доступными снаружи испытательной секции ().Смещение испытательной пластины измеряли с помощью двух оптических датчиков смещения (D64, разрешение 20 кГц, Philtec Inc., Аннаполис, Мэриленд, США) и регистрировали с помощью платы сбора данных (NI USB-6210, National Instruments Corporation, Остин, Техас, США). USA) с частотой 1024 Гц с использованием настроенного сценария Matlab. Инструмент Scope программного обеспечения GalilTools (GalilTools 1.6.4.576, Galil Motion Control Inc., Роклин, Калифорния, США) использовался для записи напряжения, тока и положения серводвигателей, а также сигнала запуска, все с частотой 512 Гц. .
Компьютерное проектирование экспериментальной установки. Силовая пластина установлена под испытательной частью с крылом, выступающим вертикально в воздушный поток. Два двигателя за пределами испытательной секции управляют стреловидностью и взмахами крыла.
2.3. Кинематика гребка крыла
Чтобы исследовать влияние кинематики гребка крыла, мы выбрали две базовые модели гребка, для которых нужно выполнить серию изменений. Первый образец был основан на кинематике E.fuscus [24]. Второй образец мазка был основан на кинематике Tadarida brasiliensis (бразильская летучая мышь со свободным хвостом) [25], члена семейства Molossidae, характеризующегося высокими крыльями AR (). Паттерн E. fuscus характеризуется более высокими амплитудами взмахов и колебаний, а также равной продолжительностью хода вверх и вниз (). Для всех рисунков штрихов колебательное и поворотное движение находятся в фазе, что приводит к входному сигналу прямолинейной траектории. В общем, плоскость штриха близка к вертикали, когда угол развертки мал, а угол между плоскостью штриха и горизонталью уменьшается с увеличением движения развертки.
Таблица 1.
Диапазон испытанной кинематики хода. Для сравнения также приведены исходные значения, полученные для Eptesicus fuscus , вида летучих мышей, на котором основана физическая модель [24], а также для второго вида с заметно другим ходом крыльев, Tadarida brasiliensis [ 25].
| параметр | E. fuscus | T. brasiliensis | мин. | макс. | приращение |
|---|---|---|---|---|---|
| частота, f (Гц) | 9 | 9 | 2 | 10 | 2 |
| 955 80 | 20 | 110 | 15 | ||
| амплитуда развертки, φ (°) | 55 | 15 | 15 | 55 | 10 | 6 | передаточное отношение | 6 | вниз55 | 0,44 | 0,44 | 0,56 | 0,06 |
Мы выполнили анализ параметров по всем переменным на основе этих двух базовых шаблонов штрихов (). Два базовых хода и 17 комбинированных ударов, которые возникают в результате изменения одного параметра за раз, были протестированы при скорости ветра U ∞ = 5,0 и 7,5 мс -1 для всех пяти крыльев (диапазон чисел Рейнольдса на основе среднего хорда 10 000 < Re c <26 000).
2.4. Сбор данных
Каждое испытание взмахами начиналось с крыла в планирующем положении (). Затем крыло перемещалось в положение, представляющее собой верхнюю часть хода вниз, и через 50 полных циклов взмахов крыла перед возвращением в нейтральное положение планирования. Данные о силе собирались на протяжении фазы взмахов и конечного планирования.
2.5. Обработка данных
Чтобы гарантировать достижение устойчивого состояния, первые 10 и последние пять циклов взмахов крыльев из 50 зарегистрированных циклов были исключены из анализа.Силовая пластина с опорой на изгиб действует как пружина-амортизатор, подверженная нестационарному периодическому воздействию из-за взмахивающего крыла, F ( t ). Обратите внимание, что эта сила включает в себя как аэродинамические, так и инерционные силы, связанные с движением крыла. Для простоты мы описываем движение в направлении x , хотя следующая процедура применима как к направлениям x , так и y . Когда пластина движется динамически, смещение секций пластины может быть записано как
2.1
, где y , и — положение, скорость и ускорение системы соответственно. Масса м , жесткость пружины k и коэффициент демпфирования β являются известными характеристиками силовой пластины, измеренными ранее при динамической калибровке [24] ().
Таблица 2.
Характеристики силовой пластины в направлениях подъема и сопротивления. Жесткость, k , была определена с использованием процедуры статической калибровки, измеряя смещение в зависимости от приложенной силы.Собственная частота, масса и демпфирование определялись с помощью динамической калибровки или теста «кольцо вниз». Чувствительную пластину отодвинули от положения равновесия, а затем отпустили. Колебательное затухание положения пластины использовалось вместе с жесткостью для определения собственной частоты: f o ; масса — м; и коэффициент демпфирования β [24].
| жесткость пружины | коэффициент демпфирования | масса | собственная частота | |
|---|---|---|---|---|
| k (Н · м −1 ) | b (Н · м −149) м (кг) | f 0 (Гц) | ||
| ось подъема | 224 500 | 6.5 | 3,3 | 35 |
| ось сопротивления | 89200 | 1,2 | 2,7 | 27 |
Измеренное смещение, y ( т ), соответствовало серии Фурье , сохраняя члены, связанные с частотой возбуждения и высшими гармониками, вплоть до собственной частоты силовой пластины. Скорость и ускорение были вычислены из ряда Фурье, и с использованием известных характеристик силовой пластины, m , k и β , движущая сила, F ( t ), была рассчитывается по уравнению (2.1). Инерционный вклад в силу, измеренный путем регистрации сил, возникающих в результате взмахов крыла в неподвижном воздухе и без прикрепленной мембраны, затем вычитался, оставляя только аэродинамическую силу для конкретной комбинации кинематических параметров.
Некоторые комбинации кинематических параметров оказались более подверженными шуму измерения, что привело к плохой воспроизводимости измерений силы при этих настройках. Измерения, которые явно отличались от всех других кривых набора комбинации параметров, были исключены из дальнейшего анализа.Комбинации параметров с менее чем двумя действительными испытаниями также были исключены из дальнейшего анализа.
2.6. Масштабирование скорости и безразмерные числа
Сила, создаваемая каждым набором параметров, зависит от семи входных переменных: полупространства крыла, b , площади крыла, S , частоты махов, f , угла амплитуды махов, θ , угол амплитуды развертки, φ , отношение хода вниз, DR и скорость набегающего потока, U ∞ .Чтобы сравнить генерирование силы для различных моделей хода и разных моделей крыла, мы характеризовали каждое испытание безразмерным отношением средней относительной горизонтальной скорости к средней вертикальной скорости ветра на среднем пролете: U v / U h . Обратите внимание, что соотношение скоростей при ходе вниз и вверх различается. Вертикальная скорость с временным разрешением U v может быть выражена как
2,2
Аналогичным образом горизонтальная скорость U h определяется как
2.3
, где ω = fπ / DR и n = 0 для хода вниз и ω = fπ / (1 — DR) и n = 1 для хода вверх.
Комбинация скорости набегающего потока, взмахов и движений также влияет на эффективный угол атаки α eff и эффективную воздушную скорость U eff , испытываемую крылом во время цикла взмахов крыла
и
(). Эффективные мгновенные углы атаки более экстремальны при более низких скоростях набегающего потока, особенно во время хода вверх, в основном потому, что относительный вклад вертикальной составляющей скорости, вызванной колебательным движением, уменьшается с увеличением скорости ветра.Частота и амплитуда махов вызывают самые большие изменения в местных условиях потока, что приводит к существенным изменениям угла атаки. Коэффициенты подъемной силы и сопротивления определяются величиной разрешенного во времени вектора скорости, описываемого формулами U v и U h
2,4
и
2,5
Краткое описание относительного направления потока и сила при взмахах. Эффективные углы атаки ( a ) и величина потока ( b ) в течение цикла взмахов крыльев в центре махового крыла для разных частот махов, f , амплитуд махов и стреловидности, θ и φ , и отношения хода вниз DR для обеих скоростей набегающего потока.Черные стрелки показывают направление увеличения значения параметра. Изменения частоты взмахов имеют самое сильное влияние на эффективный угол атаки и относительную скорость потока, тогда как изменения амплитуды развертки и отношения хода вниз оказывают лишь незначительное влияние.
Выбор мгновенной скорости для нормализации наложил определенные ограничения, поскольку он основан на квазистационарных предположениях, но он также имеет значительную полезность, особенно если скорость крыла сравнима или даже больше, чем скорость прямого полета.
2.7. Статистика
Статистические тесты были выполнены с использованием набора инструментов Matlab Statistics and Machine Learning. Чтобы сравнить генерацию силы между моделями, мы выполнили ковариационный анализ (ANCOVA) с использованием aoctool на усредненных по ходу крыльев коэффициентах подъемной силы и сопротивления. Данные из отдельных событий сбора данных обрабатывались как независимые точки данных. Мы независимо протестировали C L и C D движения вверх и вниз с использованием линейной регрессии.Мы сгруппировали данные в 15 бинов с шириной бина 1/15 от общего диапазона отношения скоростей для каждого теста. Такое количество бункеров обеспечивало минимум две точки данных для каждого непустого бункера. Перед статистическим анализом мы исключили выбросы в каждой ячейке. Точки данных, которые были больше среднего ± стандартное отклонение. отличные от всех данных в корзине были исключены из статистического анализа (дополнительный электронный материал).
После выявления значительных различий между линейной регрессией отношения силы к скорости, мы сравнили результаты предыдущего анализа, используя multcompare , чтобы определить статистически значимые различия между моделями.
3. Результаты и обсуждение
3.1. Изменение сил в зависимости от соотношения скоростей
Во время скольжения подъемная сила и сопротивление различаются между моделями и для каждой модели зависят от скорости. Силы скольжения не показывают тенденции по отношению к AR (). Коэффициент лобового сопротивления для модели AR2.5ca для U ∞ = 5,0 м с −1 кажется подозрительно низким и требует подтверждения в будущем, но включен здесь для полноты картины.
Таблица 3.
Сводка коэффициентов подъемной силы и сопротивления для всех моделей при обеих скоростях набегающего потока.
| площадь крыла | полуразмах | коэффициент подъемной силы | коэффициент лобового сопротивления | |||||
|---|---|---|---|---|---|---|---|---|
| S (см 2 ) | b | мс -1 | 7,5 мс -1 | 5,0 мс -1 | 7,5 мс -1 | |||
| AR3.5bl | 48,0 | 13,0 | 0.75 | 0,81 | 0,50 | 0,36 | ||
| AR2.5ca | 48,0 | 11,0 | 0,86 | 0,78 | 0,15 | 0,41 | 0,41 | 0,86 | 0,82 | 0,40 | 0,34 |
| AR2.5cs | 67,2 | 13,0 | 0,75 | 0,58 | 0,30 | 0,26 | 37,3 | 13,0 | 0,79 | 0,88 | 0,42 | 0,50 |
Диапазон соотношений скоростей U v / U 2 h для хода вниз меньше / U 2 h (). Стреловидное движение крыла увеличивает горизонтальную скорость (знаменатель) во время хода вниз, когда крыло движется вперед, тогда как движение назад во время хода вверх уменьшает относительную горизонтальную скорость. Сводка средних коэффициентов подъемной силы и сопротивления для базовой модели, AR3.5bl, разделенные на ход вниз и ход вверх. Скорость набегающего потока обозначается размером маркера. Стиль маркера обозначает отношение хода вниз. Цветовая кодировка представляет движение крыльев: больше зеленого цвета указывают на небольшое движение крыла, а фиолетовые цвета — на движение большого крыла. Синий — это индикатор движения крыла, в котором преобладает стреловидность, а красный — почти чистое машущее движение. Передаточное число — это отношение относительной горизонтальной скорости к относительной вертикальной скорости ветра над крылом. Все крылья создают положительную подъемную силу при движении вниз и отрицательную подъемную силу при движении вверх, но величина подъемной силы сильно зависит от соотношения скоростей (). Высокие отношения скоростей, связанные с большими движениями крыльев, приводят к более высоким силам. При низких соотношениях скоростей коэффициент подъемной силы самый низкий для моделей гребка с большими углами взмахов и разворотов во время хода вниз (, фиолетовые маркеры). Во время движения вниз крыло движется вперед, и комбинированное движение приводит к увеличению эффективного угла атаки и воздушной скорости ().Обратное верно во время движения вверх. Кроме того, податливость мембраны крыла допускает автоматический изгиб, на который влияет направление потока. Во время гребка вверх угол атаки обычно отрицательный () и, вероятно, уменьшит 9% -ый встроенный прогиб или даже приведет к обратному изгибу кожной мембраны в области рук, где форма мембраны не усиливается пальцами. В таком случае крыло будет отклонять воздушный поток вверх, а не вниз, что может усилить противоположные тенденции в коэффициентах подъемной силы при движении вниз и вверх.За некоторыми исключениями, величина C L больше во время хода вниз, чем во время хода вверх, и, таким образом, крыло создает чистую подъемную силу в течение полного цикла (и §3.2). Сводная информация о влиянии частоты махов, кратности хода вниз, амплитуды маховика и амплитуды развертки на подъемную силу и сопротивление во время хода вниз. На каждом графике один параметр соответствующей базовой линии изменяется в заданном диапазоне (), а другие параметры остаются постоянными. Кругов: E.базовый рисунок мазка fuscus ; кресты: T. brasiliensis штрихов; синий: 5 м с −1 скорость набегающего потока; оранжевый: 7,5 м с −1 . Планки погрешностей указывают на стандартное отклонение средних значений независимых испытаний. Базовые данные более толстые на всех панелях. ( a ) Частота махов, ( b ) отношение хода вниз, ( c ) амплитуда махов и ( d ) амплитуда развертки. Коэффициент лобового сопротивления слабо зависит от отношения скоростей ().Многие случаи высокой развертки (синие и пурпурные символы) создают относительно высокое сопротивление. Это явление возникает из-за механического поведения мембраны при взмахах. В начале хода вниз, когда крыло находится в наиболее стреловидном положении, мембрана выпирает (, красная стрелка). Когда крыло движется вперед, мембрана растягивается и образует гладкую поверхность до середины хода вниз, когда крыло начинает складываться по направлению к телу. Усиление задней кромки слишком податливо, чтобы компенсировать провисание мембраны, и выпуклость появляется снова.Этот эффект наиболее выражен, когда скорость набегающего потока и угол амплитуды колебания малы, что соответствует комбинациям параметров, в которых наблюдаются более высокие значения сопротивления. При более высоких скоростях набегающего потока и амплитудах взмахов увеличенное аэродинамическое давление на мембрану подвергает мембрану большему натяжению и, вероятно, снижает эффект выпучивания. Последовательность снимков одного цикла взмахов крыльев в спокойном воздухе. Амплитуда колебания составляет θ, = 110 °, развертка — β, = 55 °, частота колебаний — f = 9 Гц.Камера 1 расположена спереди и над крылом, если смотреть на верхнюю сторону крыла в основном спереди, камера 2 немного приподнята, а также показывает нижнюю сторону крыла. Верхний ряд показывает ход вниз, нижний ряд — последовательность движений вверх. Красные стрелки показывают выпуклость мембраны, когда крыло находится в стреловидном положении. Наши данные показывают, что выпуклость мембраны влияет на генерацию силы больше, когда скорость набегающего потока мала, а амплитуда колебаний мала. Потому что изменения эффективных мгновенных углов атаки более значительны при более низких скоростях набегающего потока, особенно во время хода вверх (), и потому что частота и амплитуда махов приводит к наибольшим изменениям в местных условиях потока. частота и амплитуда махов влияют на подъемную силу больше, чем на коэффициент качания и хода вниз ( a, c ), что имеет небольшой чистый эффект ( b, d ). Сопротивление уменьшается с амплитудой махов, но частота махов не оказывает сильного влияния, кроме небольшого увеличения подъемной силы при максимальной частоте махов ( a, c ).Сопротивление увеличивается с увеличением амплитуды развертки ( d ), вероятно, из-за выпуклости мембраны (см. Также выше). Напротив, предыдущая работа, в которой использовалась аналогичная модель с более прочно усиленной задней кромкой рычага, протестированная в той же аэродинамической трубе [22], продемонстрировала положительную корреляцию между углом махов, частотой махов и углом плоскости гребка для средней подъемной силы и тяги. Различия в конструкции моделей, в частности флаттер задней кромки и деформация эластичной мембраны из-за аэродинамического давления, могут лежать в основе этих расходящихся результатов.Наши результаты хорошо согласуются с результатами Hu et al . [21], которые обнаружили положительную корреляцию между частотой взмахов и чистой подъемной силой с помощью модели мембраны, испытанной в диапазоне от 1 до 10 Гц при частоте взмахов и от 0 до 10 мс -1 . Для скоростей набегающего потока ниже 4 м / с –1 , податливое мембранное крыло, используемое в этом исследовании, создавало тягу при увеличении частоты; однако, как и наши крылья, их податливое мембранное крыло создавало чистое сопротивление вместо тяги при более высоких скоростях набегающего потока, сравнимых со скоростями, испытанными в наших экспериментах, и сопротивление увеличивалось, когда частота взмахов превышала 6 Гц. AR не влияет на подъемную силу или лобовое сопротивление в диапазоне протестированных схем хода (; электронный дополнительный материал). Хотя коэффициенты силы C L и C D явно увеличиваются или уменьшаются в зависимости от отношения скоростей во многих случаях, они демонстрируют значительный разброс, особенно в случае C D во время подъема вверх. , и мы не наблюдаем статистически значимого тренда, зависящего от АР крыла.Два крыла, AR3.5bl и AR4.5cs, не показывают уменьшения коэффициента лобового сопротивления с увеличением отношения скоростей, в отличие от трех других крыльев, у которых C D уменьшалось с увеличением отношения скоростей. Однако наклон этих пяти линий регрессии статистически незначимо отличается (вероятность α = 5%). Наклоны C L в зависимости от регрессии отношения скоростей для двух моделей с одинаковой площадью, но с самым высоким и самым низким AR, AR2.5ca и AR4.5ca различаются только во время движения вверх ( p <0,05). Зависимость от соотношения скоростей подъемной силы во время хода вниз и сопротивления во время всего взмаха крыла существенно не различается между этими двумя крыльями ( p > 0,05) (дополнительный электронный материал). Крыло, которое больше всего отличается от всех остальных крыльев по подъемной силе, — это модель AR2.5cs; Что касается соотношения скоростей, это крыло показывает увеличение подъемной силы при движении вниз и уменьшение при движении вверх больше, чем у других крыльев.Однако его наклоны регрессии сопротивления больше всего похожи на крылья AR2.5ca и AR4.5ca при движении вниз ( p = 1,00 и p = 0,96, соответственно). Сводка результатов статистического анализа. Отдельная линия линейной регрессии подходит для всех пяти моделей коэффициентов подъемной силы и сопротивления, разделенных на ход вниз и вверх. Отсутствие значительных изменений в C L и C D с AR предполагает, что AR является плохим предсказателем летного поведения и экологии вида в диапазоне значений, наблюдаемых у летучих мышей, с исключение молосидов.В этом исследовании мы не тестировали модели с такими высокими значениями AR, как те, которые распространены в этом семействе, хотя мы действительно использовали одну базовую схему гребков, основанную на кинематике взмахов крыльев молосса, T. brasiliensis . T. brasiliensis может летать на больших высотах и достигать высоких пиковых скоростей [26,27], а их более высокий AR может обеспечить более высокое отношение подъемной силы к лобовому сопротивлению по сравнению с моделями с низким AR, протестированными здесь. Мы не исследовали влияние AR на энергопотребление, но прогнозируем, что крылья с наибольшей площадью или размахом крыла требуют большей мощности, потому что их угловой момент выше в первом случае из-за большей общей массы и из-за большего радиуса (размах ), который размещает часть массы дальше от тела, что требует от двигателей большего крутящего момента для изменения направления хода во втором.Этот эффект может быть уравновешен более низким наведенным сопротивлением и, следовательно, меньшей наведенной мощностью из-за большего размаха крыльев, но поскольку мы не наблюдали значительного влияния AR на лобовое сопротивление, мы не ожидаем сильного удара. Мы отметили наибольший износ моделей AR2.5cs, крыла с наибольшей площадью крыла, и AR4.5ca, крыла с наибольшим размахом. Мы полагаем, что это явилось прямым следствием перенесенных ими нагрузок. В целом, аэродинамическая сила, испытываемая моделью AR2.5cs, выше, чем у других крыльев (сопоставимый C L , поскольку другие крылья с большей площадью указывают на более высокую подъемную силу).Для крыла AR4.5ca инерционные силы выше, чем для моделей с более коротким размахом крыла, что вызывает более высокую нагрузку на каркас при быстром изменении направления хода крыла. В отличие от многих моделей роботов, в которых используется только взмах крыльев, в модели, которую мы здесь использовали, использовались как взмахи, так и подметание. Эта дополнительная степень свободы дает некоторые эксплуатационные преимущества; стреловидность вперед на низких скоростях полета вперед может использоваться для поддержания величины эффективной скорости при одновременном контроле эффективного угла атаки.Это может быть полезно для роботизированных устройств, в которых требуется работа на низкой скорости с тяжелыми грузами и высокими коэффициентами подъемной силы. Однако кинематика комбинированного взмахивания и подметания имеет свои проблемы: податливая мембрана близко следует за срабатыванием взмахов, особенно там, где она прикрепляется к телу модели, но она более существенно отклоняется от теоретически продиктованного движения развертки; в частности, площадь крыла уменьшается при стреловидности крыла и увеличивается при стреловидности вперед.«Выпуклость» мембраны, наблюдаемая при больших углах поворота, является симптомом отсутствия точного контроля над площадью мембраны и приводит к нежелательному увеличению коэффициентов сопротивления. Летучие мыши развили активные механизмы для управления натяжением мембраны крыла, такие как движение ног [28] и активная модуляция жесткости кожи с помощью мышц, которые прикрепляются к коллагену и эластиновым соединительнотканным элементам кожи [7,29]. У C. brachyotis длина задней кромки между лодыжкой и пятым пальцем увеличивается во время хода вниз и уменьшается во время хода вверх из-за этого динамического контроля геометрии крыла [28].Вдохновленные этим, мы разрабатываем новую версию нашей механической заслонки с «ножкой», в которой место крепления крыла на теле движется синхронно с размахом скелета руки. Когда крыло движется вперед и назад, нога вращается вместе с сегментом руки, а прикрепление к телу плюс рука, вместе взятые, следует за вращением плеча. Это гарантирует, что площадь крыла не меняется так сильно, и, таким образом, помогает поддерживать натяжение в мембране рук. Второе усовершенствование могло бы заключаться в разработке более гиперэластичного материала мембраны крыла, который, подобно биологической мембране крыла летучей мыши, может лучше приспособиться к значительному диапазону движения крыла без чрезмерной складки или коробления. При больших углах атаки воздушный поток над крылом больше не повторяет профиль крыла и разделяется, что приводит к увеличению лобового сопротивления и уменьшению подъемной силы, что в конечном итоге приводит к срыву. Хотя податливые крылья способны выдерживать более высокие углы атаки перед срывом, чем жесткие крылья, поскольку изгиб крыла может саморегулироваться, чтобы уравновесить разницу давлений между верхней и нижней поверхностями крыла [30,31], воздушный поток все же разделяется, когда угол наклона атаки становится слишком экстремальной.Кинематические модели, которые включают быстрое и высокоамплитудное маховое движение, создают неблагоприятно большие эффективные углы атаки, особенно во внешней части крыла, а также при среднем ходе вниз и вверх при максимальной вертикальной скорости ( a ). Таким образом, эти части цикла хода подвержены отслоению и остановке. Скручивание крыла, при котором эффективный угол атаки на дальних частях крыла может быть уменьшен путем переориентации крыла по отношению к потоку, регулировки шага вниз во время хода вниз и вверх во время хода вверх, может смягчить эти проблемы. Использование птицами закручивания крыльев было признано давно [32], и есть свидетельства того, что летучие мыши также контролируют эффективный угол атаки локально по размаху крыльев. Эффективный угол атаки изменяется в течение цикла взмахов крыльев при разных скоростях полета у Glossophaga soricina (длинноязычная летучая мышь Палласа) [33]. Относительный угол атаки остается относительно постоянным на протяжении всего хода вниз при более высоких скоростях полета, но становится умеренно отрицательным во время хода вверх. Это предполагает наклон маховика для лучшего совмещения с основным направлением потока [33].Аналогичные результаты были получены для Leptonycteris yerbabuenae (меньшая длинноносая летучая мышь) [34]. Точно так же крылатые летучие мыши сохраняют очень маленькую или даже отрицательную линию хорды в середине хода вниз [35]. У большой коричневой летучей мыши, E. fuscus , мы наблюдаем четкое продольное движение вокруг запястья [24]. В середине хода вниз крыло ориентировано под очень пологим или, возможно, слегка отрицательным углом по отношению к направлению полета, но в середине хода вверх крыло поднимается вверх, а пальцы находятся в почти вертикальном положении ().Для механических крыльев возможно вращение по длинной оси предплечья для обеспечения угла наклона маховика. Численные исследования также демонстрируют важность скручивания крыла, которое, по-видимому, необходимо для увеличения подъемной силы и создания тяги вместо сопротивления в податливом крыле, похожем на летучую мышь [36,37]. Два снимка E. fuscus в установившемся полете [24]; цифра III выделена красным. ( a ) Средний ход вниз; махи рукой ориентированы под пологим или слегка отрицательным углом по отношению к направлению полета.( b ) Средний ход вверх; крыло поднято вверх, что приводит к крутому положительному углу между крылом и направлением полета. Эти наблюдения, объединенные с анализом различий между ходом вверх и ходом вниз, предполагают, что в модели роботизированного крыла создание силы значительно выиграет от дополнительной степени свободы шага. В модели такого типа большой шаг крыла был бы ключевым механизмом для уменьшения лобового сопротивления и отрицательной подъемной силы при движении вверх. В дополнение к скручиванию крыла, изменение площади крыла во время хода вверх является эффективным средством контроля сопротивления и снижения инерционных затрат при движении вверх, что наблюдалось как у мелких птиц [38,39], так и у птероподидов. летучие мыши [40]. Птицы могут легко уменьшать площадь крыльев, не вызывая при этом побочных эффектов. Перья могут скользить друг по другу, поскольку они перекрывают друг друга, не нарушая гладкую подъемную поверхность. Летучие мыши, однако, сталкиваются с проблемой, аналогичной той, что наблюдалась в нашей модели во время развертки: уменьшение поверхности крыла может снизить натяжение, которое сохраняет мембрану гладкой, что приводит к вздутию или складкам.Для летучих мышей решение этой проблемы заключается в составе кожи: мембранная кожа крыла летучей мыши представляет собой волокнистый композит, состоящий из коллагеновой матрицы с встроенной сетью предварительно напряженных эластиновых волокон [29]. Эта уникальная конструкция мембраны служит для гофрирования мембраны крыла при ее складывании, сокращая лишнюю длину и предотвращая взмахи или выпуклость крыла. Преимущество изменения площади крыла было успешно продемонстрировано в предыдущей версии использованного здесь механического закрылка [22,23].Однако проблема размещения избыточной длины мембраны во время втягивания изотропных крыльев остается сложной задачей. Прикрепление мембраны к крылу в его наиболее загнутой назад конфигурации предотвратит образование складок и сохранит натяжение мембраны при движении крыла вперед во время движения вниз. Однако это решение предъявляет высокие требования к исполнительным механизмам (в данном случае серводвигатели) и высоким нагрузкам на каркас крыла и место крепления корпуса, когда используются «обычные» эластичные мембранные материалы, такие как силикон.Этот стресс приводит к усталости и сокращению срока службы. Имитация анизотропного, гиперупругого поведения материала биологической мембраны будет предпочтительным подходом, и исследования в этом направлении являются многообещающими [41]. Конструкция, изготовление и испытания роботизированного крыла, которое улавливает несколько важных характеристик летучих мышей, а также позволяет проводить экспериментальные манипуляции, продемонстрировали несколько ценных особенностей конструкции крыла с биовдохновлением и развеяли некоторые первоначальные ожидания относительно роли AR .Мы пришли к выводу, что рисунок хода крыла сильнее влияет на генерацию аэродинамической силы, чем геометрическая AR. Создание подъемной силы сильно зависит от отношения относительной вертикальной скорости к относительной горизонтальной скорости ветра, при этом более высокие вертикальные скорости приводят к большей подъемной силе. Зависимость сопротивления менее четкая, отчасти потому, что значения сопротивления ниже и подвержены большей экспериментальной неопределенности. Тем не менее, более высокие отношения скоростей уменьшают сопротивление во время хода вниз. Применимы ли наши результаты к более крупным летучим мышам, которые летают в режиме более высоких чисел Рейнольдса, где квазистационарная аэродинамика становится более применимой, остается неясным.Кроме того, мы не исследовали очень высокий диапазон AR, который относительно редко встречается у летучих мышей, но характерен для молосид. Основываясь на выводах, полученных в ходе этих экспериментов с использованием относительно простых моделей, мы предлагаем некоторые желательные направления для конструкции крыла в будущих экспериментах с роботизированным крылом: (i) включение механизма уменьшения площади крыла с использованием сгибания локтя и запястья во время подъема вверх [23] , (ii) смягчение вздутия мембраны в стреловидном положении крыла либо за счет использования «ножки», которая следует за стреловидным движением, либо за счет использования анизотропных гиперупругих материалов, которые допускают экстремальное растяжение по размаху без существенного удлинения по хорде и, наконец, (iii) введение вращения по длинной оси предплечья для обеспечения шага махов руки и, таким образом, управления локальным углом атаки. Коэффициент текущей ликвидности, также известный как оборотный капитал Чистый оборотный капитал Чистый оборотный капитал (NWC) — это разница между текущими активами компании (за вычетом денежных средств) и текущими обязательствами (за вычетом долга) на ее балансе. Коэффициент, измеряет способность бизнеса выполнять свои краткосрочные обязательства, которые подлежат погашению в течение года. Коэффициент учитывает вес общих оборотных активов Текущие активы Текущие активы — это все активы, которые компания ожидает преобразовать в денежные средства в течение одного года.Они обычно используются для измерения ликвидности по сравнению с общей суммой текущих обязательств Текущие обязательства Текущие обязательства — это финансовые обязательства хозяйствующего субъекта, срок погашения которых наступает в течение года. Компания показывает это на. Он указывает на финансовое состояние компании и на то, как она может максимизировать ликвидность своих оборотных активов для погашения долга и кредиторской задолженности. Формулу коэффициента текущей ликвидности (см. Ниже) можно использовать для простого измерения ликвидности компании. Изображение: Курс CFI по основам финансового анализа Формула коэффициента текущей ликвидности: Коэффициент текущей ликвидности = текущие активы / текущие обязательства Если компания владеет: Текущие активы = 15 + 20 + 25 = 60 миллионов Краткосрочные обязательства = 15 + 15 = 30 миллионов Коэффициент текущей ликвидности = 60 миллионов / 30 миллионов = 2.0x В настоящее время коэффициент текущей ликвидности компании равен 2, что означает, что он может легко рассчитаться по каждому доллару ссуды или кредиторской задолженности дважды. Оценка более 1 говорит о финансовом благополучии компании. В отношении того, что «слишком много», нет верхнего предела, поскольку он может сильно зависеть от отрасли, однако очень высокий коэффициент текущей ликвидности может указывать на то, что компания оставляет неиспользованными лишние денежные средства, а не инвестирует в развитие своего бизнеса. Введите свое имя и адрес электронной почты в форму ниже и загрузите бесплатный шаблон прямо сейчас! Вы можете просмотреть все бесплатные шаблоны Excel Шаблоны Excel и финансовых моделейЗагрузить бесплатные шаблоны финансовых моделей — библиотека электронных таблиц CFI включает шаблон финансовой модели с 3 отчетами, модель DCF, график долга, график амортизации, капитальные затраты, проценты, бюджеты, расходы, прогнозирование, диаграммы, графики , расписания, оценка, сопоставимый анализ компании, другие шаблоны Excel, чтобы найти больше способов помочь в вашем финансовом анализе. Оборотные активы — это ресурсы, которые можно быстро конвертировать в наличные в течение года или меньше. К ним относятся следующие: Краткосрочные обязательства — это деловые обязательства перед поставщиками и кредиторами, а также другие платежи, подлежащие оплате в течение года. Сюда входят: Этот коэффициент текущей ликвидности классифицируется вместе с несколькими другими финансовыми показателями, известными как коэффициенты ликвидности. Все эти коэффициенты оценивают деятельность компании с точки зрения ее финансовой устойчивости по отношению к ее непогашенному долгу.Знание коэффициента текущей ликвидности жизненно важно для принятия решений инвесторами, кредиторами и поставщиками компании. Коэффициент текущей ликвидности является важным инструментом оценки жизнеспособности их деловых интересов. Другие важные коэффициенты ликвидности включают: Ниже приведено видеообъяснение того, как рассчитать коэффициент текущей ликвидности и почему он вопросы при проведении анализа финансовой отчетностиАнализ финансовой отчетностиКак проводить анализ финансовой отчетности.Это руководство научит вас выполнять анализ финансового отчета и отчета о прибылях и убытках. Видео: курсы CFI по финансовому анализу Благодарим вас за то, что вы прочитали это руководство для понимания формулы коэффициента текущей ликвидности. CFI является официальным глобальным поставщиком услуг аналитика финансового моделирования и оценки (FVMA). ® Стань сертифицированным аналитиком финансового моделирования и оценки (FMVA) ® Сертификат CFI «Финансовый аналитик по моделированию и оценке» (FMVA) ® поможет вам обрести уверенность в своих силах. финансовая карьера.Запишитесь сегодня! обозначение. Чтобы продолжить обучение и продвинуть свою финансовую карьеру, вам будут полезны следующие ресурсы CFI: 3.2. Влияние кинематики на создание силы
3.3. Влияние соотношения сторон
4. Значение для конструкции крыла робота
4.1. Роль стреловидности в натяжении крыла
4.2. Важность скручивания крыла
4.3. Площадь крыла и свойства мембраны
5. Заключительные замечания
Формула коэффициента текущей ликвидности — примеры, как рассчитать коэффициент текущей ликвидности
Что такое коэффициент текущей ликвидности?
Формула коэффициента текущей ликвидности
Загрузите бесплатный шаблон формулы коэффициента текущей ликвидности
Шаблон коэффициента текущей ликвидности
Загрузите бесплатный шаблон Excel, чтобы углубить свои знания в области финансов! Формула коэффициента текущей ликвидности — что такое оборотные активы?
Формула коэффициента текущей ликвидности — Что такое текущие обязательства?
Зачем использовать формулу коэффициента текущей ликвидности?
Дополнительные ресурсы